





PC機(jī)與單片機(jī)多機(jī)的互相通信
本文提出了一種切實(shí)可行的方法,通過(guò)實(shí)際電路搭建和調(diào)試,實(shí)現(xiàn)了PC機(jī)與單片機(jī)多機(jī)的互相通信,達(dá)到了預(yù)定的目標(biāo),使該系統(tǒng)具有如下功能:
(1)PC機(jī)可以對(duì)所有100多個(gè)單片機(jī)進(jìn)行控制,根據(jù)需要,發(fā)送不同控制字到達(dá)每個(gè)單片機(jī);
(2)PC機(jī)對(duì)單片機(jī)的狀態(tài)修改是隨機(jī)的、沒(méi)有規(guī)律的;
(3)所有單片機(jī)將自身的一些狀態(tài)信息按照順序回傳至PC機(jī)。
1 互通信的幾種實(shí)現(xiàn)方法
PC 機(jī)至多個(gè)單片機(jī)的廣播比較簡(jiǎn)單,難度較大的是多個(gè)單片機(jī)發(fā)送數(shù)據(jù)至PC機(jī)。由于100多個(gè)單片機(jī)均掛在一個(gè)數(shù)據(jù)總線上,系統(tǒng)設(shè)計(jì)的難點(diǎn)就在于數(shù)據(jù)總線控制權(quán)的傳遞,絕對(duì)不能出現(xiàn)有2個(gè)或者2個(gè)以上設(shè)備同時(shí)向總線上發(fā)送數(shù)據(jù)。系統(tǒng)設(shè)計(jì)之初,考慮了兩種總線控制方式有接力式和點(diǎn)名式:
(1)接力式總線控制方式
這種控制方式的基本思路是:初始化后,所有單片機(jī)在接收完P(guān)C機(jī)數(shù)據(jù)后,處于串行接收狀態(tài),不占用總線控制權(quán)。PC機(jī)發(fā)出回送開始指令,第1個(gè)單片機(jī)響應(yīng)該指令,并立即占有總線控制權(quán),向總線上的PC機(jī)發(fā)送數(shù)據(jù),數(shù)據(jù)發(fā)送完成后,緊接著第1個(gè)單片機(jī)發(fā)送控制指令,通知第2個(gè)單片機(jī),同時(shí)第1個(gè)單片機(jī)退出總線控制權(quán),處于接收狀態(tài);第2個(gè)單片機(jī)接收到第1個(gè)單片機(jī)的開始指令后,和前面第1個(gè)單片機(jī)一樣,開始向總線上發(fā)送數(shù)據(jù),并在結(jié)束傳送之后通知第3個(gè)單片機(jī),如此這般,不斷接力傳輸,輪流控制總線,直至最后一個(gè)單片機(jī)完成數(shù)據(jù)傳送。在單片機(jī)控制總線,進(jìn)行回傳的過(guò)程中,如果要通過(guò)PC機(jī)向某個(gè)或者某些單片機(jī)傳送數(shù)據(jù)時(shí),PC機(jī)軟件會(huì)自動(dòng)將這些數(shù)據(jù)存儲(chǔ)下來(lái),等到最后一個(gè)單片機(jī)接收向PC機(jī)送數(shù)據(jù)之后,PC機(jī)再占用數(shù)據(jù)總線,開始向單片機(jī)傳送數(shù)據(jù)。
(2)點(diǎn)名式總線控制方式
該控制方式與接力式控制方式大體相同,不同的是這種控制方式需要等待PC 機(jī)點(diǎn)名指令。系統(tǒng)初始化后,單片機(jī)接收PC機(jī)指令、數(shù)據(jù)之后,PC機(jī)發(fā)送點(diǎn)名指令,讓第1個(gè)單片機(jī)開始傳送數(shù)據(jù),第1個(gè)單片機(jī)接收該指令后,立即占用總線,開始傳送數(shù)據(jù),傳送結(jié)束后,發(fā)送結(jié)束指令至PC 機(jī),PC 機(jī)在接收該結(jié)束指令后,立即占用總線,再發(fā)送點(diǎn)名指令,讓第2個(gè)單片機(jī)開始傳送數(shù)據(jù),如此不斷動(dòng)作,直至最后一個(gè)單片機(jī)結(jié)束傳送。
在單片機(jī)傳送數(shù)據(jù)時(shí),如果PC 機(jī)要送數(shù)據(jù)至單片機(jī),可以在接收完某個(gè)單片機(jī)數(shù)據(jù)之后,暫停發(fā)送點(diǎn)名指令,直接發(fā)送數(shù)據(jù)至某個(gè)或者某些單片機(jī)。待數(shù)據(jù)發(fā)送完成后,繼續(xù)接上原先的中斷的點(diǎn)名順序號(hào),繼續(xù)向后點(diǎn)名、傳送數(shù)據(jù)。綜合考慮這兩種總線控制方式,不難發(fā)現(xiàn),由于沒(méi)有來(lái)回傳遞點(diǎn)名的指令時(shí)間開銷,接力式的傳輸效率會(huì)略高于點(diǎn)名式,所以,一開始還是采用了接力式的控制方式。
但是在進(jìn)行大的系統(tǒng)聯(lián)調(diào)時(shí),問(wèn)題出現(xiàn)了。由于接力式脫離PC機(jī)的過(guò)程干預(yù),一旦出現(xiàn)某個(gè)單片機(jī)程序跑飛、死機(jī)時(shí),整個(gè)程序就沒(méi)法進(jìn)行下去,一直處于等待狀態(tài),整個(gè)系統(tǒng)就癱瘓了。調(diào)試過(guò)程中出現(xiàn)過(guò)好幾次死機(jī)的情況。最后,不得不回頭修改總體方案,采用點(diǎn)名式的控制方式。如果中間某個(gè)單片機(jī)出現(xiàn)異常,沒(méi)有按照預(yù)定的程序回傳數(shù)據(jù),則PC機(jī)就可以判斷該單片機(jī)死機(jī),在經(jīng)歷過(guò)一段等待時(shí)間后,自行跳過(guò)該單片機(jī),點(diǎn)名下一個(gè)單片機(jī),繼續(xù)后續(xù)的回傳和程序。如果該故障單片機(jī)還在占用總線,影響下一個(gè)單片機(jī)的工作,則對(duì)單片機(jī)公用的復(fù)位端發(fā)送一個(gè)整體復(fù)位信號(hào),讓所有單片機(jī)復(fù)位。經(jīng)過(guò)重新調(diào)整方案后,經(jīng)過(guò)長(zhǎng)時(shí)間運(yùn)行,均沒(méi)有出現(xiàn)整機(jī)死機(jī)的狀況,總體運(yùn)行情況良好。另外,這種控制方式還有其他兩種控制方式所不具有的優(yōu)勢(shì):
可以隨時(shí)打斷回傳,幾乎實(shí)時(shí)發(fā)送新的指令到某個(gè)或者某些單片機(jī)上,該功能是非常實(shí)用的。
2 系統(tǒng)的硬件構(gòu)成
根據(jù)系統(tǒng)的總體要求,構(gòu)建了如圖1所示的硬件平臺(tái)。
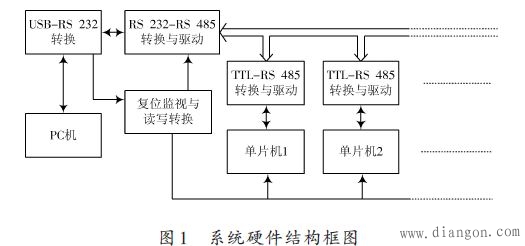
整個(gè)系統(tǒng)采用RS 485 總線結(jié)構(gòu),RS 485 為差分平衡數(shù)字通信方式,具有較強(qiáng)的抗干擾能力,廣泛應(yīng)用于遠(yuǎn)距離數(shù)字通信。RS 485和RS 422A總線最大的區(qū)別是RS 485 可以單工雙向傳輸,而RS 422A 只能單向傳輸數(shù)據(jù),在本系統(tǒng)由于存在大量單片機(jī),如果使用RS 422A,電纜會(huì)增加一倍。另外,由于標(biāo)準(zhǔn)的RS 485鏈路只可以連接32個(gè)設(shè)備,故每個(gè)轉(zhuǎn)換器上要增加驅(qū)動(dòng)器。目前PC 機(jī)上已經(jīng)很難找到串口了,故PC 機(jī)與RS 485 總線之間采用PL2303 芯片進(jìn)行橋接。PL2303為Prolific 公司產(chǎn)品,可以很方便地將USB 接口轉(zhuǎn)換成標(biāo)準(zhǔn)RS 232 電平,用戶根本不用關(guān)心復(fù)雜的USB 協(xié)議和規(guī)范,在PC端的軟件編程中,只需像標(biāo)準(zhǔn)com口一樣使用USB口,因?yàn)镻rolific公司提供的驅(qū)動(dòng)中,已經(jīng)將該USB 口模擬成了一個(gè)標(biāo)準(zhǔn)的com 口了。該芯片最高速度可以達(dá)到115 200 b/s,極大地方便了普通串行通信與PC機(jī)的連通。復(fù)位監(jiān)視與讀寫轉(zhuǎn)換電路也是一個(gè)單片機(jī),不過(guò)該單片機(jī)只完成兩個(gè)功能。一個(gè)是就是接收RS 485 總線前的PC 機(jī)TXD(RS 232 端的TXD)發(fā)出信號(hào),一旦出現(xiàn)PC機(jī)發(fā)出的全局復(fù)位串行代碼后,立即產(chǎn)生一個(gè)全局復(fù)位信號(hào),將所有單片機(jī)進(jìn)行復(fù)位。該功能就是為了防止某個(gè)單片機(jī)出現(xiàn)故障,一直意外占用總線,導(dǎo)致整個(gè)系統(tǒng)癱瘓。
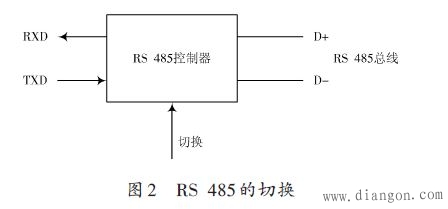
為了實(shí)現(xiàn)RS 485 的半雙工通信,必須有一個(gè)方向切換控制信號(hào),如圖2所示。在單片機(jī)端,這個(gè)控制信號(hào)很容易獲得,引出一個(gè)I/O腳,即可在單片機(jī)程序中控制該信號(hào)的切換;但是PC機(jī)端的RS 485的切換就相對(duì)比較麻煩,這也是復(fù)位監(jiān)視與讀寫轉(zhuǎn)換電路完成的另外一個(gè)重要功能:讀寫轉(zhuǎn)換。如果PC機(jī)要占用RS 485總線,則發(fā)送一個(gè)特定的串行碼,該專用單片機(jī)接收并響應(yīng)該串行碼,切換RS 485控制器,開始占用485總線并發(fā)送數(shù)據(jù),如果PC機(jī)結(jié)束發(fā)送數(shù)據(jù),則要同時(shí)發(fā)送一個(gè)特定的串行碼,通知該專用單片機(jī),進(jìn)行相應(yīng)的RS 485切換。單片機(jī)及其附屬電路組成了相關(guān)的功能電路。
主單片機(jī)采用了Silicon公司的8051F020型增強(qiáng)型單片機(jī)。該單片機(jī)最大的優(yōu)勢(shì)是內(nèi)部集成的模擬電路功能較為強(qiáng)大、單片機(jī)運(yùn)行速度快、程序編寫-燒寫-仿真較為方便。
3 系統(tǒng)的軟件構(gòu)成
軟件分為3個(gè)部分:PC機(jī)上位機(jī)程序、單片機(jī)通用程序和專用單片機(jī)程序。專用單片機(jī)的程序運(yùn)行在復(fù)位監(jiān)視與讀寫轉(zhuǎn)換電路中,該程序較為簡(jiǎn)單,就是在上電后,一直按照約定的波特率和數(shù)據(jù)格式接收PC機(jī)送出的串行數(shù)據(jù),若得到的數(shù)據(jù)符合約定的復(fù)位格式,則送出復(fù)位信號(hào);若接收到的數(shù)據(jù)符合總線切換的格式,則送出相應(yīng)的切換信號(hào)。PC 機(jī)上位機(jī)程序比較復(fù)雜,可以根據(jù)用戶的實(shí)際需要,編寫相關(guān)的應(yīng)用程序。在本文中,采用Delphi編寫了應(yīng)用程序,實(shí)現(xiàn)了對(duì)單片機(jī)群的參數(shù)設(shè)置、狀態(tài)調(diào)整、信息反饋和系統(tǒng)控制。
單片機(jī)通用程序分別運(yùn)行在100多個(gè)單片機(jī)上,是實(shí)現(xiàn)系統(tǒng)功能的基礎(chǔ)。圖3為單片機(jī)程序流程圖。
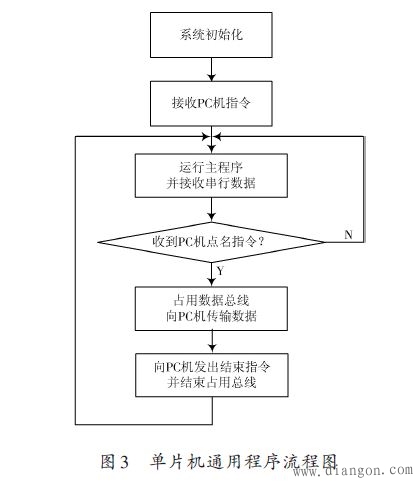
單片機(jī)初始化后,接收PC機(jī)送來(lái)的初始指令,然后開始運(yùn)行主程序,執(zhí)行單片機(jī)的主功能。同時(shí)開放串行接收中斷,一旦接收到PC機(jī)發(fā)來(lái)的指令,就進(jìn)行對(duì)比判斷,如果是PC 機(jī)對(duì)自己的點(diǎn)名,則響應(yīng)PC 機(jī)的回送指令,開始占用總線,向PC機(jī)傳送數(shù)據(jù),結(jié)束后向PC機(jī)發(fā)送結(jié)束狀態(tài)字,結(jié)束占用總線,回到主程序,同時(shí)等待接收串行數(shù)據(jù)。
4 結(jié)語(yǔ)
經(jīng)過(guò)大量試驗(yàn),課題組應(yīng)用點(diǎn)名式總線控制方式,成功解決了PC機(jī)與大量單片機(jī)的雙向互通問(wèn)題,實(shí)現(xiàn)了100 多個(gè)單片機(jī)與主控PC 機(jī)之間的互通信,達(dá)到了設(shè)計(jì)要求。電路經(jīng)過(guò)長(zhǎng)時(shí)間運(yùn)行,實(shí)際情況表明,該系統(tǒng)運(yùn)行穩(wěn)定、控制靈活、可靠性高,采用的點(diǎn)名式總線控制方式具有很好的實(shí)用價(jià)值。

編輯:admin 最后修改時(shí)間:2018-05-08

系客服")
系客服")
系客服")
系客服")
