





PICå╬Ų¼ÖC(j©®)ų«PIC16F884
buckļŖ┬Ę
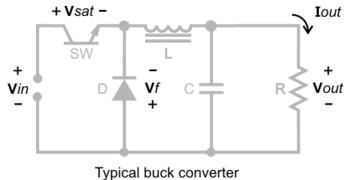
▀@╩Ūę╗éĆĮĄē║ļŖ┬ĘŻ¼SW į┌┤╦╠Ä═©╚ļPWM Ż¼▀M(j©¼n)ąąĮĄē║Ą─ų„ę¬╣żū„Ż¼VoutĘųē║║¾Ż¼ūŅĖ▀▓╗│¼▀^ąŠŲ¼╣żū„ļŖē║ Ż©5V ę▓ąą Ż®▌ö╚ļĄĮPIC AN1┐┌Ż¼▀M(j©¼n)ąąAD▐D(zhu©Żn)ōQŻ¼
īó▐D(zhu©Żn)ōQĄ─ĮY(ji©”)╣¹į┌1602╔Ž’@╩Š│÷üĒĪŻ╚ń╣¹ļŖē║▓╗╩ŪŽļꬥ─ļŖē║ │╠ą“▒ŃĖ─ūāPWMĄ─š╝┐š▒╚Ż¼ęį▀_(d©ó)ĄĮąĶꬥ─ųĄĪŻ
ų„ꬣh(hu©ón)╣Ø(ji©”)į┌1602 Ą─│§╩╝╗» īæöĄ(sh©┤)ō■(j©┤) ║═īæųĖ┴Ņ ęį╝░ PICĄ─ADåóäė╣żū„─ŻēKŻ¼│╠ą“╚ńŽ┬
#include<htc.h>
__CONFIG(0x201A);
#define uint unsigned int
#define uchar unsigned char
#define rs RC4 //öĄ(sh©┤)ō■(j©┤)├³┴Ņ
#define en RC5 // ╩╣─▄Č╦
#define DATA PORTD //öĄ(sh©┤)ō■(j©┤)┐┌
//RC1 ū„×ķPWM▌ö│÷┐┌
const uchar dis1[]="The voltage is:"; //asm("nop");
const uchar dis2[]=" . V";
void delay(uchar time) //1ms
{
uint j;
for(time;time>0;time--)
for(j=160;j>0;j--);
}
void lcd_wcmd(uchar cmd)
{
rs = 0;
en = 0;
DATA = cmd;//īó8╬╗öĄ(sh©┤)ō■(j©┤)═©▀^P0┐┌é„Įo1602
delay(2);
en = 1;
delay(2);
en = 0;
}
void lcd_wdat(uchar dat)
{
rs = 1;
en = 0;
DATA= dat;//īó8╬╗öĄ(sh©┤)ō■(j©┤)═©▀^P0┐┌é„Įo1602
delay(2);
en = 1;
delay(2);
en = 0;
}
void lcd_init()
{
TRISC=0Xcf; //1100 1111
TRISD=0X00;
lcd_wcmd(0x38); ////16*2’@╩ŠŻ¼5*7³c(di©Żn)ĻćŻ¼8╬╗öĄ(sh©┤)ō■(j©┤)
lcd_wcmd(0x0c); //’@╩Šķ_Ż¼ĻP(gu©Īn)╣Ōś╦(bi©Īo)
lcd_wcmd(0x06); //ęŲäė╣Ōś╦(bi©Īo)
lcd_wcmd(0x01); //ŪÕ│²LCDĄ─’@╩Šā╚(n©©i)╚▌
}
void pwm_init()
{
TRISC1=1; //CCP2 OUTPUT DISABLE
PR2=0XFF;
CCP2CON=0X3C; //0011(CCPR1L║¾ā╔╬╗))1100 11XX PWM MODE
CCPR2L=0X3F; //CCPR2L:CCP2CON<5:4>/4(PR2+1)PULSE WIDTH
//0X3F 25%
TMR2IF=0;
T2CON=0X05; //åóäėČ©ĢrŲ„2 ŅA(y©┤)ĘųŅl▒╚╩Ū1:4
while(TMR2IF)
{
TMR2IF=0;
TRISC1=0;
}
}
void adc_init()
{
ADCON0=0X45;// f/2Ą─Ņl┬╩ AN1═©Ą└ AD▐D(zhu©Żn)ōQ═Ļ│╔ Į¹ų╣ADC
ADCON1=0X80; //ėęī”²R ģó┐╝ļŖē║ VSS VDD
TRISA=0X01; //▌ö╚ļ
delay(5);
}
void deal_ad()
{
uint temp;
uint ad_sample;
uint result;
uchar a1,a2,a3;
GO_DONE=1;
while(GO_DONE);
ad_sample=ADRESL+(ADRESH<<8);
result=(ad_sample*500)>>10; //ģó┐╝ļŖē║5V öU(ku©░)┤¾┴╦100▒Č
temp=result;
a1=temp/100;
a2=temp%100/10;
a3=temp%100%10;
if(a1!=0)
{
lcd_wcmd(0x80+0x44);
lcd_wdat(a1+0x30);
}
lcd_wcmd(0x80+0x45);
lcd_wdat(a2+0x30);
lcd_wcmd(0x80+0x47);
lcd_wdat(a3+0x30);
}
void lcd_dis()
{
uchar i;
lcd_wcmd(0x80);
i=0; //įO(sh©©)ų├’@╩Š╬╗ų├×ķĄ┌ę╗ąąĄ─Ą┌5éĆūųĘ¹
while(dis1[i]!='\0')
{ //’@╩ŠūųĘ¹"welcome!"
lcd_wdat(dis1[i]);
i++;
}
lcd_wcmd(0x80+0X40);
i=0; //įO(sh©©)ų├’@╩Š╬╗ų├×ķĄ┌ę╗ąąĄ─Ą┌5éĆūųĘ¹
while(dis2[i]!='\0')
{ //’@╩ŠūųĘ¹"welcome!"
lcd_wdat(dis2[i]);
i++;
}
}
void main()
{
delay(10);
lcd_init(); //│§╩╝╗»LCD ų╗ę¬īæŲ╩╝ĄžųĘŠ═ Š═ąą┴╦░Ī
adc_init();
while(1)
{
lcd_dis();
deal_ad();
}
// pwm_init();
while(1);
}
▓╗╩Ū║▄═Ļ├└Ż¼āH╣®ģó┐╝ĪŻPWMĄ─š{(di©żo)╣Ø(ji©”)▀Ćø]═Ļ╔Ų ▓╗▀^▀@ę▓▓╗╩Ū║▄┤¾ļyČ╚┴╦

ŠÄ▌ŗŻ║admin ūŅ║¾ą▐Ė─ĢrķgŻ║2019-10-12

ŽĄ┐═Ę■")
ŽĄ┐═Ę■")
ŽĄ┐═Ę■")
ŽĄ┐═Ę■")
