





RS485ͨ�ź�Modbus�f(xi��)�h
�����ڹ��I(y��)���ơ����ͨӍ�����܃x�����I��ͨ����r���Dz��ô���ͨ�ŵķ�ʽ�M�Д�(sh��)��(j��)���Q��������õķ�ʽ��RS232�ӿڣ����ڹ��I(y��)�F(xi��n)�����^���s�����N늚��O����ڭh(hu��n)���Юa(ch��n)�����^���늴Ÿɔ_����������̖��ݔ�e�`������֮�⣬RS232�ӿ�ֻ�܌��F(xi��n)�c���cͨ�ţ����߂�(li��n)�W(w��ng)���ܣ�����ݔ���xҲֻ���_����ʮ�ף����ܝM���h���xͨ��Ҫ��RS485�t��Q���@Щ���}����(sh��)��(j��)��̖���ò�ւ�ݔ��ʽ��������Ч�Ľ�Q��ģ�ɔ_���}�������x���Ե�1200�ף��������S�����հl(f��)�O��ӵ�ͬһ�l�����ϡ��S�����I(y��)����ͨ��Խ��Խ�࣬1979��ʩ�͵�늚��ƶ���һ�����ڹ��I(y��)�F(xi��n)���Ŀ����f(xi��)�hModbus�f(xi��)�h���F(xi��n)�ڹ��I(y��)��ʹ��RS485ͨ�ň��Ϻܶ����Modbus�f(xi��)�h������(ji��)�n�҂�Ҫ�v��һ��RS485ͨ�ź�Modbus�f(xi��)�h��
�����Ά�ʹ��һ�KKST-51�_�l(f��)���Dz��܉��M��RS485���ģ����ܶ�ͬ�W��Ҫ���@��(ji��)�n����Uչ�n���vһ�£����Ҫ�����n���P����Ҫ����ُ�IUSB�D(zhu��n)485ͨ��ģ�K��
����1��RS485ͨ��
�������H����RS485֮ǰRS232���ѽ�(j��ng)�Q��������RS232�Ў�̎����ĵط���
����1���ӿڵ���̖�ƽֵ�^�ߣ��_��ʮ��V�����דp�Ľӿ��·��оƬ�����Һ�TTL�ƽ�����ݣ���˺͆�Ƭ�C�·��������Ԓ��횼��D(zhu��n)�Q�·��
����2����ݔ�����о��ޣ��������^�ߣ�һ�㵽��ʮKb/s�͵��O���ˡ�
����3���ӿ�ʹ����̖����GND�c�����O���γɹ���ģʽ��ͨ�ţ��@�N����ģʽ��ݔ���a(ch��n)���ɔ_�����ҿ��ɔ_����Ҳ���^����
����4����ݔ���x���ޣ����ֻ��ͨ�Ŏ�ʮ�ס�
����5��ͨ�ŵĕr��ֻ�܃��c֮�g�M��ͨ�ţ����܉�?q��)��F(xi��n)���C(li��n)�W(w��ng)ͨ�š�
����ᘌ�RS232�ӿڵIJ��㣬�Ͳ�����F(xi��n)��һЩ�µĽӿژ˜ʣ�RS485��������֮һ�����߂����µ����c��
����1���҂����vA/D�ĕr���v�^�����̖ݔ��ĸ��ͬ�rҲ��B�˲��ݔ��ĺ�̎�����ă�(y��u)���ǿ������ƹ�ģ�ɔ_�����乤�I(y��)�F(xi��n)���ĭh(hu��n)�����^���s���ɔ_���^�࣬����ͨ��������õ��Dz�ַ�ʽ���Ϳ�����Ч�����ƹ�ģ�ɔ_����RS485����һ�N���ͨ�ŷ�ʽ������ͨ�ž�·�ǃɸ���ͨ����A��B����D+��D-����ʾ��߉��1���ԃɾ�֮�g��늉����+(0.2~6)V��ʾ��߉��0���ԃɾ��g��늉����-(0.2~6)V����ʾ����һ�N���͵IJ��ͨ�š�
����2��RS485ͨ���ٶȿ죬����ݔ�ٶȿ����_��10Mb/s���ϡ�
����3��RS485��(n��i)���������Y(ji��)��(g��u)�����õ���ƽ���(q��)�����Ͳ�ֽ������ĽM�ϣ����ɔ_����Ҳ������ӡ�
����4����ݔ���x���h�����_��1200�����ң��������Ă�ݔ���ʺ͂�ݔ���x�dzɷ��ȵģ�ֻ����100Kb/s���µĂ�ݔ�ٶȣ������_������ͨ�ž��x�������Ҫ��ݔ���h���x����ʹ�����^��
����5�������ڿ������M��(li��n)�W(w��ng)���F(xi��n)���Cͨ�ţ����������S������հl(f��)�����ĬF(xi��n)�е�RS485оƬ�������п��Ԓ�32��64��128��256�Ȳ�ͬ���O����(q��)������
����RS485�Ľӿڷdz����Σ���RS232��ʹ�õ�MAX232����Ƶģ�ֻ��Ҫһ��RS485�D(zhu��n)�Q�����Ϳ���ֱ�Ӻ��҂���Ƭ�C��UART���нӿ��B��������������ȫʹ�õ��Ǻ�UARTһ�µĮ�������ͨ�Ņf(xi��)�h����������RS485�Dz��ͨ�ţ���˽��Ք�(sh��)��(j��)�Ͱl(f��)�͔�(sh��)��(j��)�Dz���ͬ�r�M�еģ�Ҳ�����f����һ�N���p��ͨ�š����҂�?n��i)���Д�ʲô�r��l(f��)�ͣ�ʲô�r������أ�
����RS485�оƬ�ܶ࣬�@��(ji��)�n�҂���MAX485�����v��RS485ͨ�ţ���D1��ʾ��
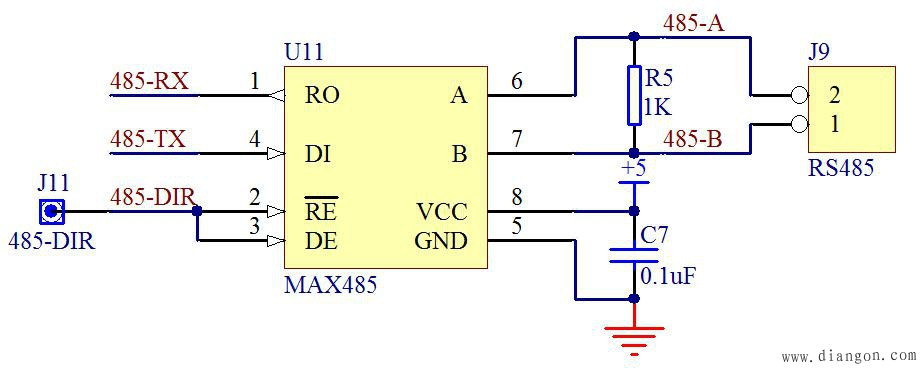
�D1 MAX485Ӳ���ӿ�
����MAX485������(Maxim)�Ƴ���һ���RS485�D(zhu��n)�Q��������5�_��8�_���Դ���_��6�_��7�_����485ͨ���е�A��B�ɂ����_����1�_��4�_�քe�ӵ��҂���Ƭ�C��RXD��TXD���_�ϣ�ֱ��ʹ�Æ�Ƭ�CUART�M�Д�(sh��)��(j��)���պͰl(f��)�͡���2�_��3�_���Ƿ������_�ˣ�����2�_�ǵ��ƽʹ�ܽ�������3�_�Ǹ��ƽʹ��ݔ���(q��)�������҂����@�ɂ����_�B��һ��ƽ�r���l(f��)�͔�(sh��)��(j��)�ĕr�����@�ɂ����_�ǵ��ƽ��MAX485̎�ڽ��ՠ�B(t��i)������Ҫ�l(f��)�͔�(sh��)��(j��)�ĕr���@�����_���ߣ��l(f��)�͔�(sh��)��(j��)���l(f��)���ꮅ���������@�����_�Ϳ����ˡ��������RS485�Ŀ��ɔ_���ܣ���Ҫ�ڿ���MAX485��A��B���_֮�g����һ����裬�@�������ֵ��100�W��1K�����ԡ�
�������@���҂�߀Ҫ��Bһ�����ʹ��KST-51��Ƭ�C�_�l(f��)���M������Uչ���҂����_�l(f��)��ֻ�ܰѻ����Ĺ��ܽoͬ�W���������ṩ����������ͬ�W���W�����_������ԓͣ�����@�������ϡ�������M�и���Č��Ϳ���ͨ�^��Ƭ�C�_�l(f��)��ĔUչ�ӿ��M�ДUչ����ҿ��Կ����{�Gɫ�Ć�Ƭ�C���܇���32����ᘣ��@32����ᘾ��ǰц�Ƭ�C��32��IO���_ȫ�����������ˡ���ԭ��D���w�F(xi��n)�����ľ����҂���J4��J5��J6��J7�@4����������D2��ʾ��
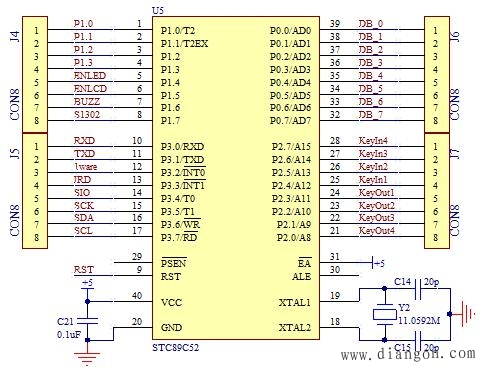
�D2 ��Ƭ�C�Uչ�ӿ�
�����@32��IO�ڲ������е�IO�ڶ������Á팦��Uչ�����м����锵(sh��)��(j��)ݔ�����ֿ������锵(sh��)��(j��)ݔ������_�Dz������õģ�����P3.2��P3.4��P3.6���_���@�������_�Dz����õġ�����P3.2�@�����_������҂��Á�Uչ���l(f��)�͵���̖�����DS18B20�ĕr���Ǻϣ�������DS18B20�������_��Ӱ�ͨ�š����@3��IO�����������29��IO�ڣ�������ʹ�öŰ���ϲ�ᘣ��Uչ����ʹ�á���Ȼ�ˣ�����Ѯ�ǰ��IO�ڑ����ڔUչ�����ˣ������ϵ������Ĺ��ܾ͌��F(xi��n)�����ˣ�Ҳ�����f��Ҫ�Uչ���ܺͰ��d���ܶ��xһ��
�������M��RS485����У��҂�ͨ���õ����_�����P3.0��P3.1������߀��һ������������_���҂�ʹ�öŰ�����B�ӵ�P1.7��ȥ��RS485������һ�ˣ���ҿ���ʹ��һ��USB�D(zhu��n)485ģ�K�����p�g�����_�l(f��)���ģ�K�ϵ�A��B�քe�����B������USB���^������X��Ȼ��Ϳ����M��ͨ���ˡ�
�����W���˵�13�µČ��ô���ͨ�ŵķ����ͳ�������@�N����ͨ�ŵķ����ͺܺ����ˣ�������һ�µġ��҂�ʹ�Ì��ô���ͨ�ŵ�˼·������һ�����εij���ͨ�^�����{(di��o)ԇ�����°l(f��)���₀�ַ�����Ƭ�C���յ�����ĩβ���ӡ���܇+�Q�С��������ͻأ����{(di��o)ԇ�����������@ʾ�������Ȱѳ����N������
������������Ҫע���һ�c�ǣ����ƽ�����nj�485�O�Þ���ՠ�B(t��i)��ֻ���ڰl(f��)�͔�(sh��)��(j��)�ĕr��Ō�485�Ğ�l(f��)�͠�B(t��i)��������UartWrite()����(sh��)�_�^��485�������_���ߣ�����(sh��)�˳�ǰ�����͡������@����һ������(ji��)�����dž�Ƭ�C�İl(f��)�ͺͽ����Д�a(ch��n)���ĕr�̶�����ֹͣλ��һ���ϣ�Ҳ�����fÿ��ֹͣλ������һ��ĕr��RI��TI���ѽ�(j��ng)��λ�����R���M���Дࣨ����Д�ʹ�ܵ�Ԓ������(sh��)�ˣ����յĕr����Ȼ�������چ��}�����l(f��)�͵ĕr��Ͳ�һ���ˣ����o���@��SBUF����һ���ֹ�(ji��)��(sh��)��(j��)�r��UARTӲ�����������һ��ֹͣλ�İl(f��)�ͺ����_ʼ���ֹ�(ji��)�İl(f��)�ͣ�������˕r�����^�m(x��)�l(f��)����һ���ֹ�(ji��)�������ѽ�(j��ng)�l(f��)���ꮅ�ˣ�Ҫֹͣ�l(f��)�Ͳ���485�������_������ʹ485����̎�ڽ��ՠ�B(t��i)�r���І��}�ˣ�����@�r�������@��ֹͣλ���Hֻ�l(f��)����һ�룬߀�]����ȫ��ɣ����Ծ�����UartWrite()����(sh��)��(n��i)DelayX10us(5)�@���������@���˞���������ӕr50us���@50us�ĕr�g����ʣ�µ�һ��ֹͣλ��ɣ���ô�@���r�g��Ȼ������ͨ�Ų����ʛQ�����ˣ��鲨�������ڵ�һ�롣
/***********************RS485.c�ļ�����Դ���a*************************/
#include <reg52.h>
#include <intrins.h>
sbit RS485_DIR = P1^7; //RS485�����x�����_
bit flagOnceTxd = 0; //�δΰl(f��)����ɘ�־�����l(f��)����һ���ֹ�(ji��)
bit cmdArrived = 0; //����_��־�������յ���λ�C�°l(f��)������
unsigned char cntRxd = 0;
unsigned char pdata bufRxd[40]; //���ڽ��վ��_�^(q��)
void ConfigUART(unsigned int baud) //�������ú���(sh��)��baud�鲨����
{
RS485_DIR = 0; //RS485�O�Þ���շ���
SCON = 0x50; //���ô��ڞ�ģʽ1
TMOD &= 0x0F; //����T1�Ŀ���λ
TMOD |= 0x20; //����T1��ģʽ2
TH1 = 256 - (11059200/12/32) / baud; //Ӌ��T1���dֵ
TL1 = TH1; //��ֵ�������dֵ
ET1 = 0; //��ֹT1�Д�
ES = 1; //ʹ�ܴ����Д�
TR1 = 1; //����T1
}
unsigned char UartRead(unsigned char *buf, unsigned char len) //���ڔ�(sh��)��(j��)�xȡ����(sh��)����(sh��)��(j��)����ָ�buf���xȡ��(sh��)��(j��)�L��len������ֵ�錍�H�xȡ���Ĕ�(sh��)��(j��)�L��
{
unsigned char i;
if (len > cntRxd) //�xȡ�L�ȴ��ڽ��յ��Ĕ�(sh��)��(j��)�L�ȕr��
{
len = cntRxd; //�xȡ�L���O�Þ錍�H���յ��Ĕ�(sh��)��(j��)�L��
}
for (i=0; i<len; i++) //��ؐ���յ��Ĕ�(sh��)��(j��)
{
*buf = bufRxd[i];
buf++;
}
cntRxd = 0; //�������Ӌ��(sh��)��
return len; //���،��H�xȡ�L��
}
void DelayX10us(unsigned char t) //ܛ���ӕr����(sh��)���ӕr�r�g(t*10)us
{
do {
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
} while (--t);
}
void UartWrite(unsigned char *buf, unsigned char len) //���ڔ�(sh��)��(j��)���뺯��(sh��)�������ڰl(f��)�ͺ���(sh��)�����l(f��)�͔�(sh��)��(j��)ָ�buf����(sh��)��(j��)�L��len
{
RS485_DIR = 1; //RS485�O��l(f��)��
while (len--) //�l(f��)�͔�(sh��)��(j��)
{
flagOnceTxd = 0;
SBUF = *buf;
buf++;
while (!flagOnceTxd);
}
DelayX10us(5); //�ȴ�����ֹͣλ��ɣ��ӕr�r�g�ɲ����ʛQ��
RS485_DIR = 0; //RS485�O�����
}
void UartDriver() //�����(q��)�Ӻ���(sh��)���z�y���յ��������(zh��)����������
{
unsigned char len;
unsigned char buf[30];
if (cmdArrived) //������_�r���xȡ̎��ԓ����
{
cmdArrived = 0;
len = UartRead(buf, sizeof(buf)-2); //�����յ��������xȡ�����_�^(q��)��
buf[len++] = '\r'; //�ڽ��յ��Ĕ�(sh��)��(j��)�������ӓQ܇�Q�з���l(f��)��
buf[len++] = '\n';
UartWrite(buf, len);
}
}
void UartRxMonitor(unsigned char ms) //���ڽ��ձO(ji��n)�غ���(sh��)
{
static unsigned char cntbkp = 0;
static unsigned char idletmr = 0;
if (cntRxd > 0) //����Ӌ��(sh��)��������r���O(ji��n)�ؿ������e�r�g
{
if (cntbkp != cntRxd) //����Ӌ��(sh��)����׃���������յ���(sh��)��(j��)�r��������eӋ�r
{
cntbkp = cntRxd;
idletmr = 0;
}
else
{
if (idletmr < 30) //����Ӌ��(sh��)��δ��׃�����������e�r���۷e���e�r�g
{
idletmr += ms;
if (idletmr >= 30) //���e�r�g���^30ms���J��һ����������ꮅ
{
cmdArrived = 1; //�O������_��־
}
}
}
}
else
{
cntbkp = 0;
}
}
void InterruptUART() interrupt 4 //UART�Д���պ���(sh��)
{
if (RI) //���յ��ֹ�(ji��)
{
RI = 0; //�ք���������Д���־λ
if (cntRxd < sizeof(bufRxd)) //���վ��_�^(q��)��δ����r��
{
bufRxd[cntRxd++] = SBUF; //��������ֹ�(ji��)�����f��Ӌ��(sh��)��
}
}
if (TI) //�ֹ�(ji��)�l(f��)���ꮅ
{
TI = 0; //�ք�����l(f��)���Д���־λ
flagOnceTxd = 1; //�O�Æδΰl(f��)����ɘ�־
}
}
/***********************main.c�ļ�����Դ���a*************************/
#include <reg52.h>
unsigned char T0RH = 0; //T0���dֵ�ĸ��ֹ�(ji��)
unsigned char T0RL = 0; //T0���dֵ�ĵ��ֹ�(ji��)
void ConfigTimer0(unsigned int ms);
extern void ConfigUART(unsigned int baud);
extern void UartRxMonitor(unsigned char ms);
extern void UartDriver();
void main ()
{
EA = 1; //�_����
ConfigTimer0(1); //����T0���r1ms
ConfigUART(9600); //���ò����ʞ�9600
while(1)
{
UartDriver();
}
}
void ConfigTimer0(unsigned int ms) //T0���ú���(sh��)
{
unsigned long tmp;
tmp = 11059200 / 12; //���r��Ӌ��(sh��)�l��
tmp = (tmp * ms) / 1000; //Ӌ�������Ӌ��(sh��)ֵ
tmp = 65536 - tmp; //Ӌ�㶨�r�����dֵ
tmp = tmp + 34; //�����Д�푑��ӕr��ɵ��`��
T0RH = (unsigned char)(tmp >> 8); //���r�����dֵ��֞�ߵ��ֹ�(ji��)
T0RL = (unsigned char)tmp;
TMOD &= 0xF0; //����T0�Ŀ���λ
TMOD |= 0x01; //����T0��ģʽ1
TH0 = T0RH; //���dT0���dֵ
TL0 = T0RL;
ET0 = 1; //ʹ��T0�Д�
TR0 = 1; //����T0
}
void InterruptTimer0() interrupt 1 //T0�Д���պ���(sh��)
{
TH0 = T0RH; //���r�����¼��d���dֵ
TL0 = T0RL;
UartRxMonitor(1); //���ڽ��ձO(ji��n)��
}
���� �F(xi��n)�ڿ��@�N���ڳ����Dz��Ǹ��X�ܺ������أ�����ͨ�ų����҂������͏͵�ʹ�ã������S���҂��W����ģ�KԽ��Խ�࣬���`��Խ��Խ�࣬ԭ�ȸ��X���s�Ė|�����F(xi��n)�ھ͕��е������ˡ��҂������d����ģ�K�õ���COM4����USB�D(zhu��n)485̓�M����COM5��ͨ�ŵĕr���҂��õ���COM5�ڣ���D3��ʾ��
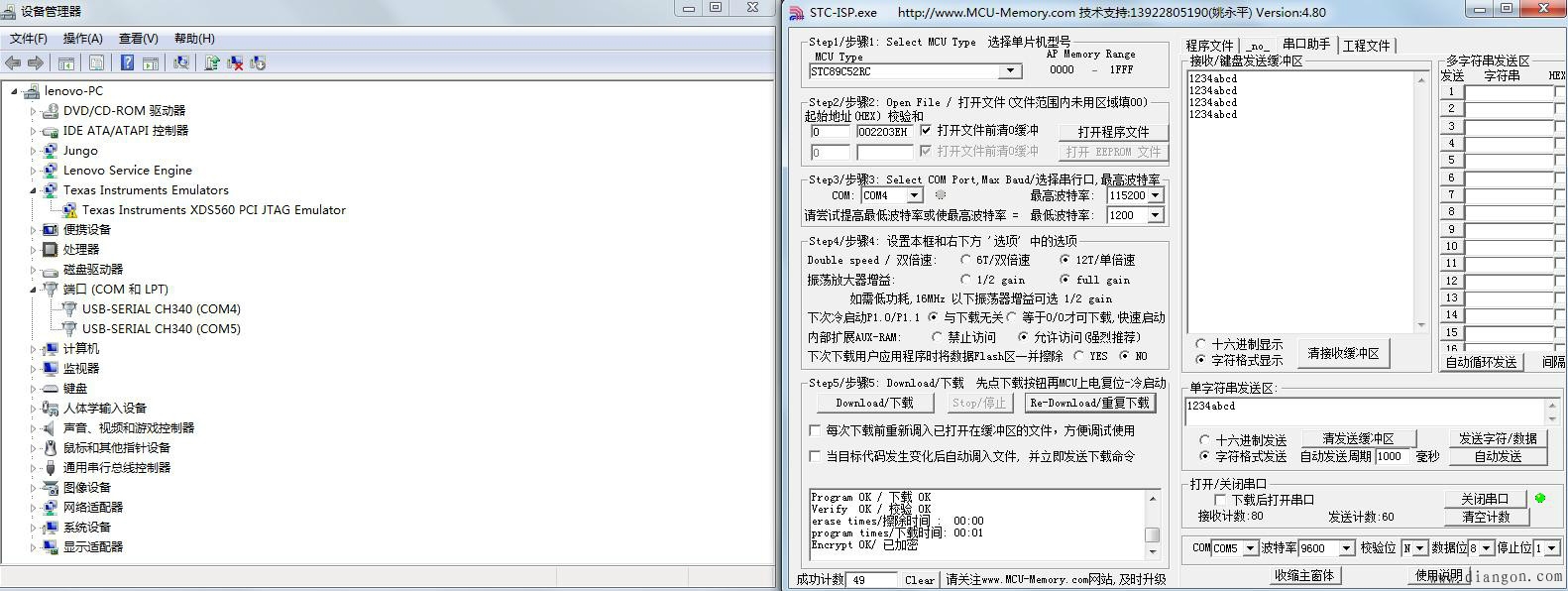
�D3 RS485����ͨ��
����2��Modbusͨ�Ņf(xi��)�h��B
���� �҂�ǰ߅�W��UART��I2C��SPI�@Щͨ�Ņf(xi��)�h��������ӵąf(xi��)�h���ǡ�λ�����e�ąf(xi��)�h�����҂��ڌW��13���ô���ͨ�ų���ĕr���҂�ͨ�^���ڰl(f��)�o��Ƭ�C���lָ���Ƭ�C����������ͬ�����飬�քe��"buzz on"��"buzz off"����"showstr"���S���҂�ϵ�y(t��ng)���s�Ե����ӣ��҂�ϣ�����Ԍ��F(xi��n)�����ָ���ָ��Խ��Խ�࣬�����ĺ�����Ƿdz��s�y�o�£��������@����ϲ�g����"buzz on"��"buzz off"��������һ����ϲ�g����"on buzz"��"off buzz"�����²�ͬ�_�l(f��)�ˆT�������Ĵ��aָ����ݣ���ͬ�S�ҵĮa(ch��n)Ʒ���ܒ쵽һ�l������ͨ�š�
�����S���@�Nì�ܵ�������أ��͕�����������������Ľ�Q���������һЩ�˜ʁ�������҂��ľ��̱�횰����@���˜ʁ����@�N�˜�Ҳ��һ�Nͨ�Ņf(xi��)�h�����Ǻ�UART��I2C��SPIͨ�Ņf(xi��)�h��ͬ���ǣ��@�Nͨ�Ņf(xi��)�h���ֹ�(ji��)���e�ģ��������Ì�ͨ�Ņf(xi��)�h����1979����Modicon(�F(xi��n)��ʩ�͵�늚˾��һ��Ʒ��)�����ȫ���һ���������ڹ��I(y��)�F(xi��n)�������ąf(xi��)�h������Modbus�f(xi��)�h��
����2.1 Modbus�f(xi��)�h���c
����Modbus�f(xi��)�h�Ǒ�������ӿ������ϵ�һ�Nͨ���Z�ԡ�ͨ�^�˅f(xi��)�h���������֮�g����������(j��ng)�ɾW(w��ng)�j(������̫�W(w��ng))�������O��֮�g����ͨ�ţ��ѽ�(j��ng)�ɞ�һ�N���I(y��)�˜ʡ�����������ͬ�S�����a(ch��n)�Ŀ����O������B�ɹ��I(y��)�W(w��ng)�j���M�м��бO(ji��n)�ء��@�N�f(xi��)�h���x��һ�N�������܉��J�Rʹ�õĔ�(sh��)��(j��)�Y(ji��)��(g��u)�������������ǽ�(j��ng)�^�ηN�W(w��ng)�j�M��ͨ�ŵġ��������˿�����Ո���L�������O����^�̣���λؑ����������O���Ո���Լ����ӂɜy�e�`ӛ䛣����ƶ���ͨ�Ŕ�(sh��)��(j��)�ĸ�ֺ̓�(n��i)�ݵĹ�����ʽ��
�������M�ж��Cͨ�ŵĕr��Modbus�f(xi��)�hҎ(gu��)��ÿ�����������Ҫ֪���������O���ַ���R�e���յ�ַ�l(f��)���^���Ĕ�(sh��)��(j��)���Q���Ƿ�Ҫ�a(ch��n)���������a(ch��n)���ηN���������Ҫ�ؑ��������������ɵķ�����Ϣ��Modbus�f(xi��)�h�l(f��)����
����Modbus�f(xi��)�h���S�ڸ��N�W(w��ng)�j�wϵ�Y(ji��)��(g��u)��(n��i)�M�к���ͨ�ţ�ÿ�N�O��(plc���˙C���桢������塢�(q��)�ӳ���ݔ��ݔ���O��)����ʹ��Modbus�f(xi��)�h�톢���h�̲�����һЩ�W(w��ng)�P���S�ڎNʹ��Modbus�f(xi��)�h�Ŀ�����W(w��ng)�j֮�g��ͨ�ţ���D4��ʾ��
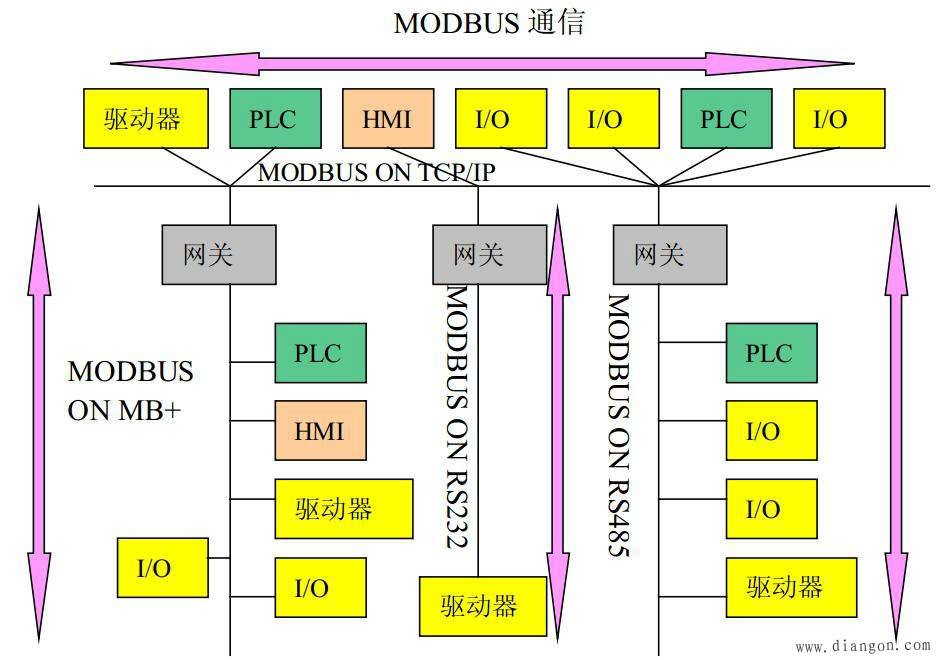
�D4 Modbus�W(w��ng)�j�wϵ�Y(ji��)��(g��u)����
����Modbus�f(xi��)�h�����w�ܘ�(g��u)��ʽ���^���s���������҂����n����҂����c��B��(sh��)��(j��)���Y(ji��)��(g��u)�͔�(sh��)��(j��)ͨ�ſ��Ʒ�ʽ������һ�����T���e���˽⡣������ҪԔ���˽⣬����ʹ��Modbus�_�l(f��)���P�O�䣬���Բ�����P�ć����ļ����M������W����
����2.2 RTU�f(xi��)�h����(sh��)��(j��)
����Modbus�ЃɷNͨ�ł�ݔ��ʽ��һ�N��ASCIIģʽ��һ�N��RTUģʽ������ASCIIģʽ�Ĕ�(sh��)��(j��)�ֹ�(ji��)��7bit��(sh��)��(j��)λ��51��Ƭ�C�o�����F(xi��n)�����ґ���Ҳ�����^�٣������@���҂�ֻ��RTUģʽ���ɷNģʽ���ƣ�����һ�N����һ�NҲ�͕��ˡ�һ�l���͵�RTU��(sh��)��(j��)����D5��ʾ��

�D5 RTU��(sh��)��(j��)��
�������҂����ô���ͨ�ų�����ƣ��҂�һ�ΰl(f��)�͵Ĕ�(sh��)��(j��)�����������һ���B�m(x��)�Ĕ�(sh��)��(j��)���M�Ђ�ݔ���҂��ڌ��ô���ͨ�ų����в��õķ����Ƕ��x30ms��������յ��Ĕ�(sh��)��(j��)���^��30ms߀�]�н��յ���һ���ֹ�(ji��)���҂����J���@�εĔ�(sh��)��(j��)�Y(ji��)������Modbus��RTUģʽҎ(gu��)����ͬ��(sh��)��(j��)��֮�g���g����3.5���ֹ�(ji��)ͨ�ŕr�g���ϡ������һ����(sh��)��(j��)���֮ǰ�г��^3.5���ֹ�(ji��)�r�g��ͣ�D�������O�䌢ˢ�®�ǰ����Ϣ���ٶ���һ���ֹ�(ji��)��һ���µĔ�(sh��)��(j��)�����_ʼ����http://www.diangon.com/������У�ͬ�ӵģ����һ������Ϣ��С��3.5���ֹ�(ji��)�r�g��(n��i)����ǰ߅һ����(sh��)��(j��)�_ʼ�ģ����յ��O�䌢���J������ǰһ����(sh��)��(j��)�����m(x��)���@��������һ���e�`����˴�ҿ�RTU��(sh��)��(j��)�����߀��16bit��CRCУ
������ʼλ�ͽY(ji��)�������D18-5�ϴ�������һ����(sh��)��(j��)����ǰ��������3.5���ֹ�(ji��)�ĕr�g�g������ʼλ�ͽY(ji��)�������H�ϛ]���κΔ�(sh��)��(j��)��T1-T2-T3-T4�������Ǖr�g�g��3.5���ֹ�(ji��)���ϵĕr�g�������������x�ĵ�һ���ֹ�(ji��)���O���ַ��
�����O���ַ���ܶ�ͬ�W�����⣬�ڶ��Cͨ�ŵĕr��(sh��)��(j��)��ô�࣬�҂�����ʲô�Д��@����(sh��)��(j��)�����Ă��O����أ��]�e�����������@���O���ַ�ֹ�(ji��)��ÿ���O�䶼��һ���Լ��ĵ�ַ�����O����յ�һ����(sh��)��(j��)�������Ȍ��O���ַ�ֹ�(ji��)�M���Д���^������c�Լ��ĵ�ַ��ͬ���t���@����(sh��)��(j��)ֱ�Ӳ���������������c�Լ��ĵ�ַ��ͬ����Ҫ���@����(sh��)��(j��)�M�н���������֮��Ĺ��ܴa��(zh��)�������Ĺ��ܡ������ַ��0x00���t�J����һ���V������������еďęC�O�䶼Ҫ��(zh��)�е�ָ�
�������ܴ��a���ڵڶ����ֹ�(ji��)���ܴ��a�ֹ�(ji��)�У�ModbusҎ(gu��)���˲��ֹ��ܴ��a������Ҳ������һ���ֹ��ܴ��a������û����Ñ��Զ��x���@Щ���ܴa��Ҳ���Ҫȥӛ��������������ȥ����ֱ�������õ����������^�����@�����ɣ����1��ʾ��
������1 Modbus���ܴa
���ܴa | ���Q | ���� |
01 | �xȡ��Ȧ��B(t��i) | ȡ��һ�M߉��Ȧ�Į�ǰ��B(t��i)(ON/OFF) |
02 | �xȡݔ���B(t��i) | ȡ��һ�M�_�Pݔ��Į�ǰ��B(t��i)(ON/OFF) |
03 | �xȡ���ּĴ��� | ��һ����������ּĴ�����ȡ�î�ǰ�Ķ��M��ֵ |
04 | �xȡݔ��Ĵ��� | ��һ�������ݔ��Ĵ�����ȡ�î�ǰ�Ķ��M��ֵ |
05 | ���Æξ�Ȧ | ����һ��߉��Ȧ��ͨ���B(t��i) |
06 | �A�ÆμĴ��� | �Ѿ��w���Mֵ�b��һ�����ּĴ��� |
07 | �xȡ������B(t��i) | ȡ��8 ����(n��i)����Ȧ��ͨ���B(t��i)���@ 8 ����Ȧ�ĵ�ַ�ɿ������Q�����Ñ�߉���Ԍ��@Щ��Ȧ���x�����f���ęC��B(t��i)���̈����m����Ѹ���xȡ��B(t��i) |
08 | �����\��У� | ���\��У�����͏ęC���Ԍ�ͨ��̎���M���u�b |
09 | ����(ֻ����484) | ʹ���Cģ�M���������ã���PC�ęC߉ |
10 | ��ԃ(ֻ����484) | ��ʹ���C�cһ�_���ڈ�(zh��)���L�����΄ՏęCͨ�ţ�̽ԃԓ�ęC�Ƿ������������΄գ��H�ں��й��ܴa 9 �Ĉ��İl(f��)�ͺ����ܴa�Űl(f��)�� |
11 | �xȡ�¼�Ӌ��(sh��) | ��ʹ���C�l(f��)����ԃ�������S���ж������Ƿ�ɹ���������ԓ�������������a(ch��n)��ͨ���e�`�r |
12 | �xȡͨ���¼�ӛ� | �������C�z��ÿ�_�ęC��ModBus��̎��ͨ���¼�ӛ䛡����ij���̎����ɣ�ӛ䛕��o�����P�e�` |
13 | ����(184/384 484 584 ) | ��ʹ���Cģ�M������������PC�ęC߉ |
14 | ̽ԃ(184/384 484 584) | ��ʹ���C�c���ڈ�(zh��)���΄յďęCͨ�ţ����ڿ�ԃԓ�ęC�Ƿ�����������������H�ں��й���13�Ĉ��İl(f��)�ͺ����ܴa�ŵðl(f��)�� |
15 | ���öྀȦ | ����һ���B�m(x��)߉��Ȧ��ͨ�� |
16 | �A�ö�Ĵ��� | �Ѿ��w�Ķ��M��ֵ�b��һ���B�m(x��)�ı��ּĴ��� |
17 | ���ęC���R | ��ʹ���C�Дྎַ�ęC����ͼ�ԓ�ęC�\��ָʾ���Ġ�B(t��i) |
18 | 884 ��MICRO 84 | ��ʹ���Cģ�M���̹��ܣ���PC��B(t��i)߉ |
19 | ����ͨ���· | �l(f��)���ǿ����e�`���ǏęC��λ����֪��B(t��i)������������ֹ�(ji��) |
20 | �xȡͨ�Å���(sh��)(584L) | �@ʾ�Uչ�惦���ļ��еĔ�(sh��)��(j��)��Ϣ |
21 | ����ͨ�Å���(sh��)(584L) | ��ͨ�Å���(sh��)����Uչ�惦�ļ������� |
22~64 | �������Uչ���܂��� |
|
65~72 | �����Ԃ��Ñ��������� | �����Ñ����ܵĔUչ���a |
73~119 | �Ƿ����� |
|
120~127 | ���� | ������(n��i)������ |
128~255 | ���� | ���ڮ������� |
�����҂�����?q��)����ܴa��̎�������dz����z�y�@���ֹ�(ji��)�Ĕ�(sh��)ֵ��Ȼ�����(j��)�䔵(sh��)ֵ���������Ĺ���̎����
������(sh��)��(j��)�����ڹ��ܴ��a��߅����n��8bit�Ĕ�(sh��)��(j��)���@��nֵ�ĵ����Ƕ��٣��ǹ��ܴ��a���_���ģ���ͬ�Ĺ��ܴ��a��߅���Ĕ�(sh��)��(j��)��(sh��)����ͬ���e�����ӣ�������ܴa��0x03��Ҳ�����x���ּĴ�������ô���C�l(f��)�͔�(sh��)��(j��)n�ĽM�ɲ��־��ǣ�2���ֹ�(ji��)�ļĴ�����ʼ��ַ����2���ֹ�(ji��)�ļĴ�����(sh��)��N*���ęC��(sh��)��(j��)n�ĽM�ɲ����ǣ�1���ֹ�(ji��)���ֹ�(ji��)��(sh��)������҂��؏͵ļĴ�����ֵ��2���ֹ�(ji��)�������@���ֹ�(ji��)��(sh��)Ҳ����2N*�����ټ���2N*���Ĵ�����ֵ����D6��ʾ��
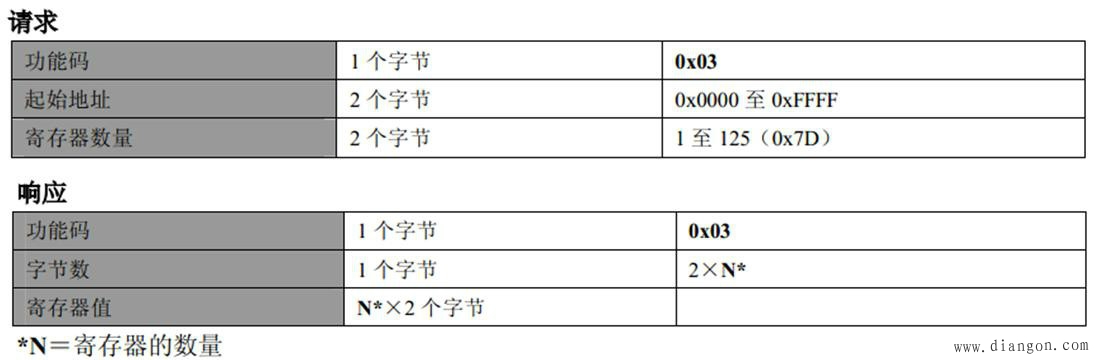
�D6 �x���ּĴ�����(sh��)��(j��)�Y(ji��)��(g��u)
����CRCУCRCУ���һ�N��(sh��)��(j��)�㷨�����Á�У(sh��)��(j��)���e�ġ�CRCУ��(sh��)��һ����(sh��)��(j��)�����ɂ��ֹ�(ji��)�⣬ǰ߅���е��ֹ�(ji��)�M���ض����㷨Ӌ�㣬Ӌ�����������һ��16bit�Ĕ�(sh��)��(j��)������CRCУ�a��������һ����(sh��)��(j��)������շ����յ���(sh��)��(j��)��ͬ�ӕ���ǰ߅���ֹ�(ji��)�M��CRCӋ�㣬Ӌ�������ٺͰl(f��)�^����CRC��16bit�Ĕ�(sh��)��(j��)�M�б��^�������ͬ�t�J�锵(sh��)��(j��)�������]�г��e��������^����ͬ���t�f����(sh��)��(j��)�ڂ�ݔ�аl(f��)�����e�`���@����(sh��)��(j��)�����G��������]�յ�һ�ӣ����l(f��)�ͷ����ڵò����ؑ�����������̎���e�`̎����
����RTUģʽ��ÿ���ֹ�(ji��)��λ���@�ӷֲ��ģ�1����ʼλ��8����(sh��)��(j��)λ����С��Чλ�Ȱl(f��)�͡�1����żУ�λ(����oУ�t�]���@һλ)��1λֹͣλ(��У�λ�r)����2��ֹͣλ(�oУ�λ�r)��

����admin ����ĕr�g��2018-05-08

ϵ�ͷ�")
ϵ�ͷ�")
ϵ�ͷ�")
ϵ�ͷ�")
