





51å╬Ų¼ÖC(j©®)1602’@╩ŠĄ─│¼┬Ģ▓©£y(c©©)ŠÓį┤│╠ą“
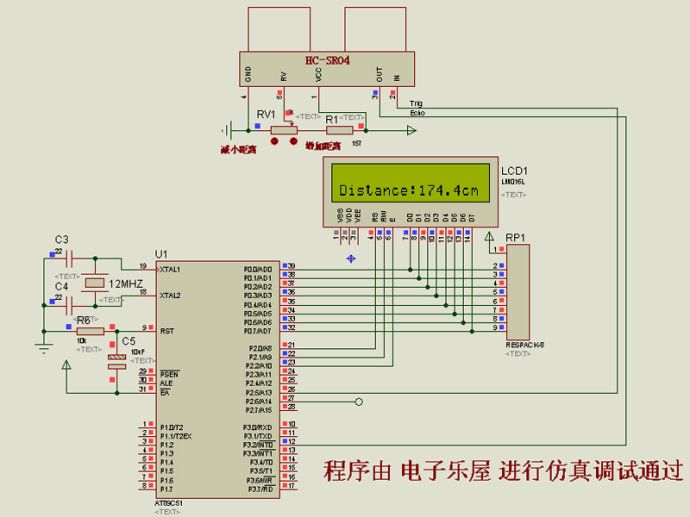
ųŲū„│¼┬Ģ▓©£y(c©©)ŠÓāxŻ¼╩Ū║▄ČÓīW(xu©”)╔·Īóå╬Ų¼ÖC(j©®)É█(©żi)║├š▀īW(xu©”)┴Ģ(x©¬)å╬Ų¼ÖC(j©®)äė(d©░ng)╩ųīŹ(sh©¬)█`Ą─ę╗éĆ(g©©)īŹ(sh©¬)ū„ĒŚ(xi©żng)─┐Ż¼▀@┐Ņ│¼┬Ģ▓©£y(c©©)ŠÓ│╠ą“Ż¼ßśī”(du©¼)─┐Ū░▒╚▌^ÅVĘ║╩╣Ą─HC-SR04│¼┬Ģ▓©─ŻēKČ°įO(sh©©)ėŗ(j©¼)Ą─Ż¼▀@┐Ņ1602’@╩ŠĄ─│¼┬Ģ▓©£y(c©©)ŠÓŠÓį┤│╠ą“Ż¼å╬Ų¼ÖC(j©®)╩Ū51ŽĄ┴ąå╬Ų¼ÖC(j©®)Ż¼│¼┬Ģ▓©£y(c©©)ŠÓ─ŻēKŽ╚ė├Ą─╩ŪHC-SRO4 │¼┬Ģ▓©£y(c©©)ŠÓ─ŻēKŻ¼å╬Ų¼ÖC(j©®)Ą─Š¦š±╩Ū12MŻ¼ĮėŠĆŻ║─ŻēKTRIGĮė P2.5 ECH0 ĮėP3.2Ż¼«ö(d©Īng)ŠÓļx│¼│÷£y(c©©)┴┐Ģr(sh©¬)Ż¼ĘČć·’@╩ŠĪ░-Ī▒Ż¼’@╩Šå╬╬╗╩ŪCMĪŻ▀@┐Ņ│╠ą“ė╔ė┌ė▓╝■▒╚▌^║å(ji©Żn)å╬Ż¼ųŲū„Ģr(sh©¬)║ĖĮė╣żū„┴┐ąĪŻ¼Äū║§╩Ū░┘Ęųų«░┘Ą─│╔╣”Ż¼ę▓┐╔ęįė├PROTEUS▄ø╝■ų▒Įė▀M(j©¼n)ąąĪŻąĶę¬│¼┬Ģ▓©£y(c©©)ŠÓĘ┬šµ┼õ╠ūĄ─É█(©żi)║├š▀Ż¼┐╔░┘Č╚╦č╦„Ż║ļŖūėśĘ(l©©)╬▌Ż¼▀@éĆ(g©©)ŠW(w©Żng)╔Žėą║▄ČÓ┐Ņ│¼┬Ģ▓©£y(c©©)ŠÓĘ┬šµ┘Y┴ŽĪŻ
#include[reg52.h> //ūóęŌšł(q©½ng)░čĪ« [ Ī»ōQ│╔ "<"
#include [intrins.h> //
#define uint unsigned int
#define uchar unsigned char
sbit rs=P2^0; //1602Ą─öĄ(sh©┤)ō■(j©┤)/ųĖ┴Ņ▀xō±┐žųŲŠĆ
sbit rw=P2^1; //1602Ą─ūxīæ(xi©¦)┐žųŲŠĆ
sbit en=P2^2; //1602Ą─╩╣─▄┐žųŲŠĆ
sbit trig=P2^5; //│¼┬Ģ▓©£y(c©©)ŠÓ─ŻēKTrig
sbit echo=P3^2; //│¼┬Ģ▓©£y(c©©)ŠÓ─ŻēKEcho
bit flag1; //ė|░l(f©Ī)ą┼╠¢(h©żo)ś╦(bi©Īo)ųŠ╬╗//
uchar count; //ųąöÓ└█╝ėūā┴┐
long int distance; //£y(c©©)┴┐╦∙Ą├ŠÓļx
unsigned char code table[ ]={"0123456789"}; //Č©┴xūųĘ¹öĄ(sh©┤)ĮM’@╩ŠöĄ(sh©┤)ūų
void delay(uint n)
{
uint x,y;
for(x=n;x>0;x--)
for(y=110;y>0;y--);
}
void delayt(uint x)
{
uchar j;
while(x-- > 0)
{
for(j = 0;j < 125;j++)
{
;
}
}
}
void lcd_wcom(uchar com)
{
rs=0; //▀xō±ųĖ┴Ņ╝─┤µŲ„
rw=0; //▀xō±īæ(xi©¦)
P0=com; //░č├³┴Ņūų╦═╚ļP0
delay(5); //čėĢr(sh©¬)ę╗ąĪĢ■(hu©¼)ā║Ż¼ūī1602£╩(zh©│n)éõĮė╩šöĄ(sh©┤)ō■(j©┤)
en=1; //╩╣─▄ŠĆļŖŲĮūā╗»Ż¼├³┴Ņ╦═╚ļ1602Ą─8╬╗öĄ(sh©┤)ō■(j©┤)┐┌,▀@³c(di©Żn)ĘŪ│Żųžę¬
en=0;
}
void lcd_wdat(uchar dat)
{
rs=1; //▀xō±öĄ(sh©┤)ō■(j©┤)╝─┤µŲ„
rw=0; //▀xō±īæ(xi©¦)
P0=dat; //░čꬒ@╩ŠĄ─öĄ(sh©┤)ō■(j©┤)╦═╚ļP0
delay(5); //čėĢr(sh©¬)ę╗ąĪĢ■(hu©¼)ā║Ż¼ūī1602£╩(zh©│n)éõĮė╩šöĄ(sh©┤)ō■(j©┤),ę▓Š═╩ŪÖz£y(c©©)├”ą┼╠¢(h©żo)Ż¼▀@³c(di©Żn)ĘŪ│Żųžę¬ĪŻ
en=1; //╩╣─▄ŠĆļŖŲĮūā╗»Ż¼öĄ(sh©┤)ō■(j©┤)╦═╚ļ1602Ą─8╬╗öĄ(sh©┤)ō■(j©┤)┐┌
en=0;
}
void lcd_init()
{
lcd_wcom(0x38); //8╬╗öĄ(sh©┤)ō■(j©┤)Ż¼ļp┴ąŻ¼5*7ūųą╬ Ż¼ė├ĄĮ╣”─▄įO(sh©©)Č©ųĖ┴Ņ
lcd_wcom(0x0c); //ķ_(k©Īi)åó’@╩ŠŲ┴Ż¼ĻP(gu©Īn)╣Ōś╦(bi©Īo)Ż¼╣Ōś╦(bi©Īo)▓╗ķWĀqŻ¼ė├ĄĮ’@╩Šķ_(k©Īi)ĻP(gu©Īn)┐žųŲųĖ┴Ņ
lcd_wcom(0x06); //’@╩ŠĄžųĘ▀fį÷Ż¼╝┤īæ(xi©¦)ę╗éĆ(g©©)öĄ(sh©┤)ō■(j©┤)║¾Ż¼’@╩Š╬╗ų├ėęęŲę╗╬╗Ż¼ė├ĄĮ┴╦īæ(xi©¦)╚ļ─Ż╩ĮįO(sh©©)ų├ųĖ┴Ņ
lcd_wcom(0x01); //ŪÕŲ┴Ż¼ė├ĄĮ┴╦ŪÕŲ┴ųĖ┴Ņ
}
void lcd_xianshi()
{
lcd_wcom(0x80+0x40);
lcd_wdat('D');
lcd_wdat('i');
lcd_wdat('s');
lcd_wdat('t');
lcd_wdat('a');
lcd_wdat('n');
lcd_wdat('c');
lcd_wdat('e');
lcd_wdat(':');
lcd_wcom(0x80+0x4c);
lcd_wdat('.');
lcd_wcom(0x80+0x4e);//å╬╬╗╩Ū└Õ├ū//
lcd_wdat('c');
lcd_wdat('m');
}
void init_t0()
{
TMOD=0x01;
TL0=0x66;
TH0=0xfc; //1ms
ET0=1;
EA=1;
}
void trigger()
{
trig=0;
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
trig=1;
}
void init_measuring()
{
trig=1;
echo=1;
count=0;
}
void measuring()
{
uchar l;
uint h,y;
TR0 = 1;
while(echo==1)
{
;
}
TR0 = 0;
l = TL0;
h = TH0;
y = (h << 8) + l;
y = y - 0xfc66;//us▓┐Ęų
distance = y + 1000 * count;//ėŗ(j©¼)╦Ń┐éĢr(sh©¬)ķg,å╬╬╗╩Ū╬ó├ļ
TL0 = 0x66;
TH0 = 0xfc;
delayt(30);
distance = 3453* distance / 20000;//įŁ╩╝×ķŻ║(0.34║┴├ū/us)*Ģr(sh©¬)ķg/2//
}
void display(uint x)
{
uchar qian,bai,shi,ge;
qian=x/1000;
bai=(x/100);
shi=(x/10);
ge=x;
lcd_wcom(0x80+0x49);//å╬╬╗╩Ū└Õ├ū//
lcd_wdat(table[qian]);
lcd_wdat(table[bai]);
lcd_wdat(table[shi]);
lcd_wcom(0x80+0x4d);
lcd_wdat(table[ge]);
}
void main()
{ lcd_init(); //ę║Š¦│§╩╝╗»
init_t0(); //Č©Ģr(sh©¬)Ų„0│§╩╝╗»
init_measuring(); //│¼┬Ģ▓©ŽÓæ¬(y©®ng)Č╦┐┌│§╩╝╗»
while(1)
{
lcd_xianshi(); //ę║Š¦’@╩Š╠žČ©ūųĘ¹
trigger(); //ė|░l(f©Ī)│¼┬Ģ▓©åóäė(d©░ng)
while(echo==0) //Ą╚┤²╗ž┬Ģ
{
;
}
measuring(); //▀M(j©¼n)ąąŠÓļx£y(c©©)┴┐
display(distance); //ī”(du©¼)£y(c©©)┴┐ĮY(ji©”)╣¹▀M(j©¼n)ąą’@╩Š
init_measuring(); //│¼┬Ģ▓©ŽÓæ¬(y©®ng)Č╦┐┌│§╩╝╗»
delayt(600); //├┐┤╬£y(c©©)┴┐ķgĖ¶60ms
}
}
//ĪŁĪŁĪŁĪŁĪŁĪŁĪŁĪŁĪŁĪŁĪŁĪŁĪŁĪŁĪŁĪŁĪŁųąöÓĘ■äš(w©┤)║»öĄ(sh©┤)ĪŁĪŁĪŁĪŁĪŁĪŁĪŁĪŁĪŁĪŁĪŁĪŁĪŁĪŁĪŁĪŁĪŁĪŁĪŁ//
void T_0()interrupt 1
{
TF0 = 0;
TL0 = 0x66;
TH0 = 0xfc;
count++;
if(count==18)
{
TR0 =0;
TL0 = 0x66;
TH0 = 0xfc;
count = 0;
}
}

ŠÄ▌ŗŻ║admin ūŅ║¾ą▐Ė─Ģr(sh©¬)ķgŻ║2018-05-23

ŽĄ┐═Ę■")
ŽĄ┐═Ę■")
ŽĄ┐═Ę■")
ŽĄ┐═Ę■")
