





ņ`äė(d©░ng)╬óMM32Č©Ģr(sh©¬)Ų„▓┘ū„ųĖ─Ž
1ĪóČ©Ģr(sh©¬)Ų„═¼▓Į
į┌MM32L073ę╗éĆ(g©©)Č©Ģr(sh©¬)Ų„ėą4 ═©Ą└ PWM ▌ö│÷Ż¼ėą┐═æ¶į┌æ¬(y©®ng)ė├ųąąĶę¬╩╣ė├ā╔éĆ(g©©)Č©Ģr(sh©¬)Ų„┐žųŲ6┬ĘPWM▌ö│÷Ż¼×ķ┴╦╩╣ā╔éĆ(g©©)Č©Ģr(sh©¬)Ų„Ą─PWM▌ö│÷ŽÓ═¼Ą─▓©ą╬Ż¼╦∙ęįąĶę¬ā╔éĆ(g©©)Č©Ģr(sh©¬)Ų„īŹ(sh©¬)¼F(xi©żn)═¼▓Į╣”─▄ĪŻ
╦∙ėą TIMx Č©Ģr(sh©¬)Ų„į┌ā╚(n©©i)▓┐ŽÓ▀BŻ¼ė├ė┌Č©Ģr(sh©¬)Ų„═¼▓Į╗“µ£ĮėĪŻ«ö(d©Īng)ę╗éĆ(g©©)Č©Ģr(sh©¬)Ų„╠Äė┌ų„─Ż╩ĮĢr(sh©¬)Ż¼╦³┐╔ęįī”(du©¼)┴Ēę╗éĆ(g©©)╠Äė┌Å──Ż╩ĮĄ─Č©Ģr(sh©¬)Ų„Ą─ėŗ(j©¼)öĄ(sh©┤)Ų„▀M(j©¼n)ąąÅ═(f©┤)╬╗Īóåóäė(d©░ng)Īó═Żų╣╗“╠ß╣®Ģr(sh©¬)ńŖĄ╚▓┘ū„ĪŻ
MM32L073Ą─├┐éĆ(g©©)Č©Ģr(sh©¬)Ų„Č╝┐╔ęįė╔┴Ēę╗éĆ(g©©)Č©Ģr(sh©¬)Ų„ė|░l(f©Ī)åóäė(d©░ng)Č©Ģr(sh©¬)Ų„ę╗░Ń╩Ū═©▀^(gu©░)▄ø╝■įO(sh©©)ų├Č°åóäė(d©░ng)Ż¼MM32L073Ą─├┐éĆ(g©©)Č©Ģr(sh©¬)Ų„ę▓┐╔ęį═©▀^(gu©░)═Ō▓┐ą┼╠¢(h©żo)ė|░l(f©Ī)Č°åóäė(d©░ng)Ż¼▀Ć┐╔ęį═©▀^(gu©░)┴Ē═Ōę╗éĆ(g©©)Č©Ģr(sh©¬)Ų„Ą──│ę╗éĆ(g©©)Śl╝■▒╗ė|░l(f©Ī)Č°åóäė(d©░ng)ĪŻ▀@└’╦∙ų^─│ę╗éĆ(g©©)Śl╝■┐╔ęį╩ŪČ©Ģr(sh©¬)ĄĮĢr(sh©¬)ĪóČ©Ģr(sh©¬)Ų„│¼Ģr(sh©¬)Īó▒╚▌^│╔╣”Ą╚įSČÓŚl╝■ĪŻ▀@ĘN═©▀^(gu©░)ę╗éĆ(g©©)Č©Ģr(sh©¬)Ų„ė|░l(f©Ī)┴Ēę╗éĆ(g©©)Č©Ģr(sh©¬)Ų„Ą─╣żū„ĘĮ╩ĮĘQ×ķČ©Ģr(sh©¬)Ų„Ą─═¼▓ĮŻ¼░l(f©Ī)│÷ė|░l(f©Ī)ą┼╠¢(h©żo)Ą─Č©Ģr(sh©¬)Ų„╣żū„ė┌ų„─Ż╩ĮŻ¼Įė╩▄ė|░l(f©Ī)ą┼╠¢(h©żo)Č°åóäė(d©░ng)Ą─Č©Ģr(sh©¬)Ų„╣żū„ė┌Å──Ż╩ĮĪŻ
ų„/Å─Č©Ģr(sh©¬)Ų„Ą─└²ūė
×ķ┴╦īŹ(sh©¬)¼F(xi©żn)ā╔éĆ(g©©)Č©Ģr(sh©¬)Ų„═Ļ╚½═¼▓ĮŻ¼╩╣ė├ę╗éĆ(g©©)Č©Ģr(sh©¬)Ų„ū„×ķ┴Ēę╗éĆ(g©©)Č©Ģr(sh©¬)Ų„Ą─ŅA(y©┤)ĘųŅlŲ„ĪŻ┐╔ęį┼õų├Č©Ģr(sh©¬)Ų„ 1 ū„×ķČ©Ģr(sh©¬)Ų„ 3 Ą─ŅA(y©┤)ĘųŅlŲ„ĪŻ
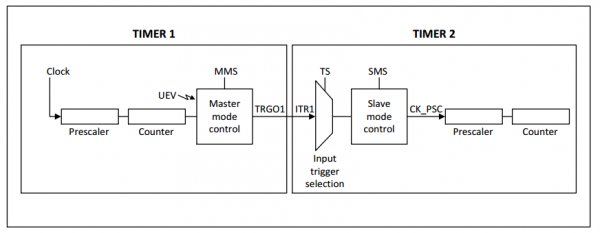
ģó┐╝╔ŽłDŻ¼▀M(j©¼n)ąąŽ┬╩÷▓┘ū„Ż║
˜┼õų├Č©Ģr(sh©¬)Ų„ 1 ×ķų„─Ż╩ĮŻ¼╦³┐╔ęįį┌├┐ę╗éĆ(g©©)Ė³ą┬╩┬╝■ UEV Ģr(sh©¬)▌ö│÷ę╗éĆ(g©©)ų▄Ų┌ąįĄ─ė|░l(f©Ī)ą┼╠¢(h©żo)ĪŻį┌TIM1_CR2╝─┤µŲ„Ą─MMS = ‗010Ģr(sh©¬)Ż¼├┐«ö(d©Īng)«a(ch©Żn)╔·ę╗éĆ(g©©)Ė³ą┬╩┬╝■Ģr(sh©¬)į┌ TRGO1╔Ž▌ö│÷ę╗éĆ(g©©)╔Ž╔²čžą┼╠¢(h©żo)ĪŻ
˜▀BĮėČ©Ģr(sh©¬)Ų„ 1 Ą─ TRGO1 ▌ö│÷ų┴Č©Ģr(sh©¬)Ų„ 3Ż¼įO(sh©©)ų├ TIM3_SMCR ╝─┤µŲ„Ą─ TS = ‗000 Ż¼┼õų├Č©Ģr(sh©¬)Ų„ 3×ķ╩╣ė├ ITR1 ū„×ķā╚(n©©i)▓┐ė|░l(f©Ī)Ą─Å──Ż╩ĮĪŻ
˜╚╗║¾░čÅ──Ż╩Į┐žųŲŲ„ų├ė┌═Ō▓┐Ģr(sh©¬)ńŖ─Ż╩Į 1Ż©TIM3_SMCR ╝─┤µŲ„Ą─ SMS = 111Ż®Ż╗▀@śėČ©Ģr(sh©¬)Ų„ 3╝┤┐╔ė╔Č©Ģr(sh©¬)Ų„ 1 ų▄Ų┌ąįĄ─╔Ž╔²čžŻ©╝┤Č©Ģr(sh©¬)Ų„ 1 Ą─ėŗ(j©¼)öĄ(sh©┤)Ų„ęń│÷Ż®ą┼╠¢(h©żo)“ī(q©▒)äė(d©░ng)ĪŻ
˜ūŅ║¾Ż¼▒žĒÜįO(sh©©)ų├ŽÓæ¬(y©®ng)Ż©TIMx_CR1 ╝─┤µŲ„Ż®Ą─ CEN ╬╗Ęųäeåóäė(d©░ng)ā╔éĆ(g©©)Č©Ģr(sh©¬)Ų„ĪŻ
ūóŻ║╚ń╣¹ OCx ęč▒╗▀xųą×ķČ©Ģr(sh©¬)Ų„ 1 Ą─ė|░l(f©Ī)▌ö│÷Ż©MMS = 1xxŻ®Ż¼╦³Ą─╔Ž╔²čžė├ė┌“ī(q©▒)äė(d©░ng)Č©Ģr(sh©¬)Ų„ 3 Ą─ėŗ(j©¼)öĄ(sh©┤)Ų„ĪŻ
void Tim1_Init(u16 Prescaler,u16Period)
{
TIM_TimeBaseInitTypeDefTIM_StructInit;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1,ENABLE);
TIM_StructInit.TIM_Period=Period;
TIM_StructInit.TIM_Prescaler=Prescaler;
TIM_StructInit.TIM_ClockDivision=TIM_CKD_DIV1;
TIM_StructInit.TIM_CounterMode=TIM_CounterMode_Up;
TIM_StructInit.TIM_RepetitionCounter=0;
TIM_TimeBaseInit(TIM1,&TIM_StructInit);
TIM_ClearFlag(TIM1,TIM_FLAG_Update);
}
void TIM3_Init(u16 psc,u16 arr)
{
TIM_TimeBaseInitTypeDefTIM_StructInit;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3,ENABLE);
TIM_StructInit.TIM_Period=arr;
TIM_StructInit.TIM_Prescaler=psc;
TIM_StructInit.TIM_ClockDivision=TIM_CKD_DIV1;
TIM_StructInit.TIM_CounterMode=TIM_CounterMode_Up;
TIM_StructInit.TIM_RepetitionCounter=0;
TIM_TimeBaseInit(TIM3,&TIM_StructInit);
TIM_SelectOutputTrigger(TIM3,TIM_TRGOSource_Enable);
TIM_SelectInputTrigger(TIM1,TIM_TS_ITR2);
TIM_SelectSlaveMode(TIM1,TIM_SlaveMode_Gated);
TIM_SelectMasterSlaveMode(TIM1,TIM_MasterSlaveMode_Enable);
TIM3->CNT=0;
TIM1->CNT=0;
TIM_Cmd(TIM1, ENABLE);
delay_ms(300);
TIM_Cmd(TIM3, ENABLE);
delay_ms(300);
}
2ĪóČ©Ģr(sh©¬)Ų„Š½£╩(zh©│n)čėĢr(sh©¬)
į┌æ¬(y©®ng)ė├ųąŻ¼ėąĄ─ąĶꬊ½£╩(zh©│n)Ą─Č©Ģr(sh©¬)╣”─▄Ż¼į┌┐═æ¶ų¦│ų▀^(gu©░)│╠ųąŻ¼░l(f©Ī)¼F(xi©żn)ėąĄ─┐═æ¶ī”(du©¼)Č©Ģr(sh©¬)Ų„Ą─╗∙▒ŠČ©Ģr(sh©¬)╣”─▄Ą─└ĒĮŌėąą®Ų½▓ŅŻ¼Į±╠ņīó┼c┤¾╝ęę╗Ų╩╣ė├Č©Ģr(sh©¬)Ų„Ą─╗∙▒ŠČ©Ģr(sh©¬)╣”─▄ĪŻ
╬ęéā░čČ©Ģr(sh©¬)Ų„įO(sh©©)ų├ūįäė(d©░ng)ųžčb▌d╝─┤µŲ„ ARR Ą─ųĄ×ķ1000Ż¼įO(sh©©)ų├Ģr(sh©¬)ńŖŅA(y©┤)ĘųŅlŲ„×ķ47Ż¼ät“ī(q©▒)äė(d©░ng)ėŗ(j©¼)öĄ(sh©┤)Ų„Ą─Ģr(sh©¬)ńŖŻ║ CK_CNT = CK_INT / (47+1)=1MŻ¼ätėŗ(j©¼)öĄ(sh©┤)Ų„ėŗ(j©¼)öĄ(sh©┤)ę╗┤╬Ą─Ģr(sh©¬)ķgĄ╚ė┌Ż║1/CK_CNT=1usŻ¼«ö(d©Īng)ėŗ(j©¼)öĄ(sh©┤)Ų„ėŗ(j©¼)öĄ(sh©┤)ĄĮ ARR Ą─ųĄ1000 Ģr(sh©¬)Ż¼«a(ch©Żn)╔·ę╗┤╬ųąöÓŻ¼ätųąöÓę╗┤╬Ą─Ģr(sh©¬)ķg×ķŻ║1/CK_CNT*ARR=1msĪŻ
void Tim2_UPCount_test(void){
TIM_TimeBaseInitTypeDefTIM_StructInit;
NVIC_InitTypeDef NVIC_StructInit;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE);
TIM_StructInit.TIM_Period=1000;
TIM_StructInit.TIM_Prescaler=47;
TIM_StructInit.TIM_ClockDivision=TIM_CKD_DIV1;
TIM_StructInit.TIM_CounterMode=TIM_CounterMode_Up;
TIM_StructInit.TIM_RepetitionCounter=0;
TIM_TimeBaseInit(TIM2,&TIM_StructInit);
NVIC_StructInit.NVIC_IRQChannel=TIM2_IRQn;
NVIC_StructInit.NVIC_IRQChannelPriority=1;
NVIC_StructInit.NVIC_IRQChannelCmd=ENABLE;
NVIC_Init(&NVIC_StructInit);
TIM_ClearFlag(TIM2,TIM_FLAG_Update);
TIM_ITConfig(TIM2, TIM_IT_Update,ENABLE);
TIM_Cmd(TIM2, ENABLE);
}
Č©Ģr(sh©¬)Ų„ųąöÓę╗┤╬Ą─Ģr(sh©¬)ķg╩Ū 1msŻ¼╬ęéāČ©┴xę╗éĆ(g©©)╚½Šųūā┴┐ucTim2FlagŻ¼├┐«ö(d©Īng)▀M(j©¼n)ę╗┤╬ųąöÓĄ─Ģr(sh©¬)║“Ż¼ūī ucTim2FlagüĒ(l©ói)ėøõø▀M(j©¼n)╚ļųąöÓĄ─┤╬öĄ(sh©┤)ĪŻ╚ń╣¹╬ęéāŽļīŹ(sh©¬)¼F(xi©żn)ę╗éĆ(g©©) 1s Ą─Č©Ģr(sh©¬)Ż¼╬ęéāų╗ąĶę¬┼ąöÓtime ╩ŪʱĄ╚ė┌1000 ╝┤┐╔Ż¼1000 éĆ(g©©) 1ms Š═╩Ū1sĪŻ╚╗║¾░čucTim2FlagŪÕ 0Ż¼ųžą┬ėŗ(j©¼)öĄ(sh©┤)Ż¼ęį┤╦裣h(hu©ón)═∙Å═(f©┤)ĪŻ
void TIM2_IRQHandler(void)
{
TIM_ClearITPendingBit(TIM2,TIM_IT_Update);
ucTim2Flag++;
}

ŠÄ▌ŗŻ║ls ūŅ║¾ą▐Ė─Ģr(sh©¬)ķgŻ║2022-06-07

ŽĄ┐═Ę■")
ŽĄ┐═Ę■")
ŽĄ┐═Ę■")
ŽĄ┐═Ę■")
