���ã��gӭ�M�������зf���¿Ƽ�����˾�ٷ��Wվ��
���ã��gӭ�M�������зf���¿Ƽ�����˾�ٷ��Wվ��
Flash���Q���Ɂ���F(xi��n)lash�IJ�����������block�K���λ�ģ��c�����������������ܶ�惦�O�䣬����bitλ����С�xȡ/����Ć�λ��F(xi��n)lash��һ���Եز��������K���ڰl(f��)��һ�����������һ���Ե،�һ��block����Ҋ�ĉK�Ĵ�С��128KB/256KB��ȫ��������1��Ҳ��������ă���ȫ������0xFF�ˣ�������һ���ӾͲ����ˣ��������f�������õĕr�g�̣ܶ�������һ�W���^�����ݣ����ԣ�����Flash Memory������һ�㌢Flash���g�� �����٣��W�档
NAND Flash ��Ƕ��ʽϵ�y(t��ng)�������V���đ��ã�ؓ�dƽ���͉ĉK�������c֮���P�ăɂ������h�}��Uboot �� Linux ϵ�y(t��ng)�� NAND �IJ��������b�ˌ��@�ɂ����}��̎�������� ���������v��Nandflash���A֪�R��Ȼ���B�F(xi��n)�еĎ�ĉK������BBM��������ͨ�^��������Ƕ��ʽϵ�y(t��ng)�� NAND �惦����ָ�����p�������������ă�(y��u)�����ڣ������ˮ�ǰ�V��ʹ�õ��p��������������ָ����ȱ�����ڲ�Ԕ���f���˸��M������
���A֪�R
Flash��Ӳ�����F(xi��n)�C��
Flash�ăȲ��惦��MOSFET�������Ђ��Ҹ��T(Floating Gate)���������惦�����Ć�Ԫ��
��Flash֮ǰ�����⾀�ɲ���(uv-erasable)��EPROM�����ѽ�������Floating Gate�惦�����@һ���g�ˡ�
���͵�Flash�ȴ������Y�� 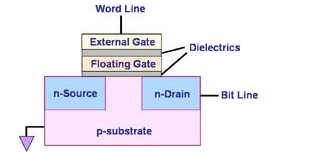
������Flash�ȴ��Ԫ������늺�(electrical charge) ��ʽ�惦�ġ��惦늺ɵĶ��٣�ȡ�Q�ڈD�е��ⲿ�T��external gate������ʩ�ӵ�늉��������������惦��Ԫ�Л_��늺�߀��ʹ��ጷ�늺ɡ��������ı�ʾ�������惦��늺ɵ�늉��Ƿ��^һ���ض����ֵVth����ʾ����ˣ�F(xi��n)lash�Ĵ惦��Ԫ��Ĭ�Jֵ������0��������Ҋ�Ĵ惦�O�䣬����Ӳ�P����Ĭ�Jֵ��0��������1���������늺�ጷŵ���늉����͵�һ���̶ȣ���������0��
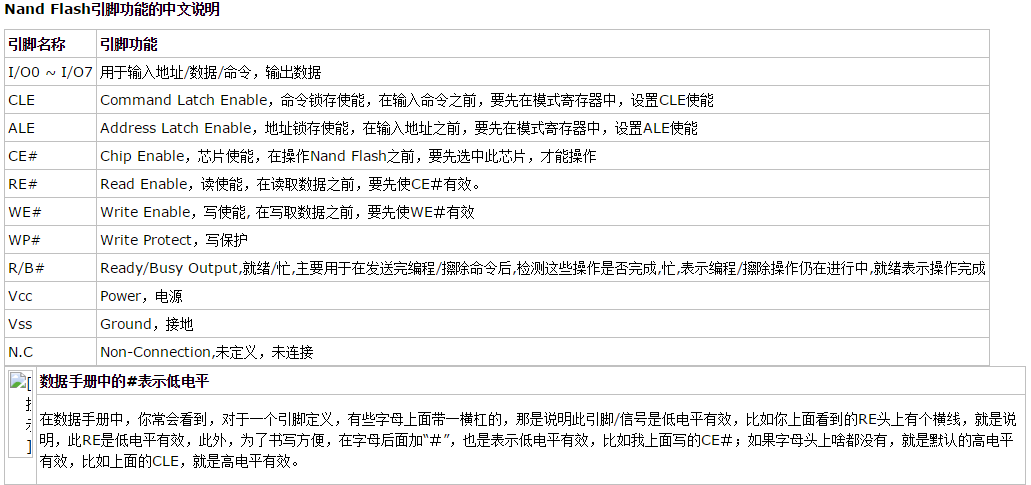
NandFlash���
Nand flash�ɱ������ͣ��f���˾��DZ��ˣ�ȱ�c��ʹ���Д����x�����׳��e������һ�㶼��Ҫ�Ќ�����ܛ������Ӳ���Ĕ���У��㷨���y(t��ng)�Q��ECC������(y��u)�c�ǣ��������f�������^�F(xi��n)�ڳ�Ҋ��Nand Flash����1GB��2GB�������8GB�Ķ����ˣ��������f���r����ˣ�����m���Á��惦�����Ĕ���������Ƕ��ʽϵ�y(t��ng)�е����ã��ஔ��PC�ϵ�Ӳ�P�����ڴ惦����������
SLC��MLC
Nand Flash���ՃȲ��惦������Ԫ��늉��IJ�ͬ�ӴΣ�Ҳ���dž��ȴ��Ԫ�У��Ǵ惦1λ������߀�Ƕ�λ���������Է֞�SLC��MLC����ôܛ������R�eϵ�y(t��ng)��ʹ���^��SLC߀��MLC�أ�
Nand Flash�OӋ�У��Ђ��������Read ID���xȡID���xȡ�Îׂ��ֹ�(ji��)��һ��������4�����µ�оƬ��֧��5���������࣬���@Щ�ֹ�(ji��)�У����Խ������ܶ����P����Ϣ�������Nand Flash�Ȳ��ǎׂ�оƬ��chip�����M�ɵģ�ÿ��chip�����ˎ�Ƭ��Plane����ÿһƬ�е�퓴�С���K��С���ȵȡ����@Щ��Ϣ�У�������һ���������R�e��flash��SLC߀��MLC��
oob / Redundant Area / Spare Area
ÿһ��퓣�����߀��һ�K�^(q��)�������e�^(q��)��spare area��/�����^(q��)��redundant area������Linuxϵ�y(t��ng)�У�һ�����OOB��Out Of Band�����@���^(q��)�����������Nand Flash��Ӳ�����ԣ��������x���r�����������e�`�����Ԟ��˱��C���������_�ԣ����Ҫ�Ќ����ęz�y�ͼm�e�C�ƣ��˙C�Ʊ�����EDC(Error Detection Code)/ECC��Error Code Correction, ���� Error Checking and Correcting���������OӋ�˶���ą^(q��)�����ڷ��Ô�����У�ֵ��
Oob���x��������һ�����S��퓵IJ���һ����ɵģ����x��퓵ĕr�����ؾ��x����oob��
�P��oob���w��;�����Y������
Bad Block Management�ĉK����
Nand Flash�������������ԣ�ֻ�����IJ����Δ������^�ǂ��Δ��������Ͼ��lj��ˡ���ʹ���^���У���ЩNand Flash��block�����F(xi��n)���É��ˣ����l(f��)�F(xi��n)�ˣ�Ҫ���r����block��ע��ĉK������ʹ�á��ڴ����P�Ĺ�������������Nand Flash�ĉĉK������һ���ֹ�����
Wear-Levelingؓ�dƽ��
Nand Flash��block������߀����ؓ�dƽ�⡣
��������Nand Flash��block��������һ���������Ƶģ����������ÿ�ζ���ͬһ��block����Ȼ���딵������ô�ǂ�block�ͺ����ױ��É��ˣ������҂�Ҫȥ����һ�£����@ô��εČ�ͬһ��block�IJ�����ƽ���ֲ�������һЩblock���棬ʹ����block��ʹ���ϣ������^ƽ�����@���������f�����Ը��ܳ������Nand Flash��
ECC�e�`У�a
Nand Flash����������ʹ���䔵���x���^���Е��l(f��)��һ�����ʵ��e�`������Ҫ�Ђ��������e�`�z�y�ͼm���ęC�ƣ����Dz��д�ECC�����ڔ����e�`�ęz�y�c�m����Nand Flash��ECC����Ҋ���㷨�к����a��BCH���@��㷨�Č��F(xi��n)��������ܛ��Ҳ������Ӳ������ͬϵ�y(t��ng)�������Լ��������Ì�����ܛ��������Ӳ����
�������f��Ӳ�����F(xi��n)�@�ECC�㷨���϶�Ҫ��ܛ���ٶ�Ҫ�죬���Ƕ���ˌ�����Ӳ�����֣����Գɱ�����Ҫ��Щ�����ϵ�y(t��ng)��������Ҫ���Ǻܸߣ���ô���Բ���ܛ�����F(xi��n)�@�ECC�㷨���������������˔����xȡ�͌���ǰ��Ҫ���Ĕ����e�`�z�y�ͼm�e��������������Ҫ����һЩ����Nand Flash���xȡ�͌����ٶ�����������Ӱ푡�
���У�Linux�е�ܛ�����F(xi��n)ECC�㷨����NAND_ECC_SOFTģʽ�������õČ����ĺ����a��
������Ŀǰ��Ҋ��MLC��Nand Flash���f�������������^���m2GB��4GB��8GB�ȣ�����BCH�㷨��BCH�㷨���������f���㷨���^���s��
�P������ˮƽ���ޣ�Ŀǰ��δ��ȫ�㶮BCH�㷨��ԭ����
BCH�㷨��ͨ�����Ɍ�����Nand Flash��Controller�У�����������Ӳ��BCH ECCģ�K�����F(xi��n)��BCH�㷨��������ܛ�����棬��Ҫ���xȡ�������딵��֮ǰ���քe��������BCH���P�ļĴ������O�ó�BCHģʽ��Ȼ���xȡ������BCH��B(t��i)�Ĵ�������֪�Ƿ����e�`�������ɵ�BCHУ�a�����ڌ��롣
����w���a����β����@Щ�Ĵ����ģ������Ǻ;��w��Ӳ�������w��nand flash��controller��ͬ����ͬ���o����ͬһ�Ĵ��a���������nand flash���_�l(f��)�ߣ���Ȼ���õ���������nand flash��controller���ֵ�datasheet�������փ��f����ȥ�������ɡ�
���^���~���f��һ�µ��ǣ��P��BCH�㷨��������Ҫ�Č��T����ܛ���㷨�ďS��ُ�I�ģ�����Micron֮ǰ�ھW�Ϸų�һ�����M�汾��BCH�㷨��
��D
Nand Flash��λ���D�F(xi��n)����Ҫ��������һЩԭ��/Ч�������£�
Ư��Ч��ָ���ǣ�Nand Flash��cell��늉�ֵ��������׃�ˣ�׃�ĺ�ԭʼֵ��һ���ˡ�
�ˬF(xi��n)���Еr��Ҳ�������^�Ⱦ���Ч����over-program effect����
����ij�����ľ��̲�����������������������P������������ij��λ��׃�ˡ�
��Ч���ǣ���һ����M�Д����xȡ�������sʹ�Ì�����ij��λ�Ĕ������a���������Ե�׃������Nand Flash�ϵ�ԓλ��ֵ׃�ˡ�
���σɷN��͵�λ���D���䌍���ڏ�Nand Flash�xȡ�����Ĕ������f����Q���е��e�`��λ�ķ���������һ�ӵģ���ͨ�^һ����У��㷨�����Q��ECC��ȥ�z�y��������z�y���m���e�`��
���ֻ�džΪ��z�y�e�`����ô����l(f��)�F(xi��n)�������`����ô�������xȡһ�μ��ɡ�
���H�и���������ǣ�ECCУ�l(f��)�F(xi��n)���e�`�����Ќ������㷨ȥ�ҳ���λ�e�`���Ҽm���^����
���Ќ��e�`�ęz�y�ͼm�������w�Č��F(xi��n)��ʽ����ܛ���㷨��Ҳ��Ӳ�����F(xi��n)����Ӳ��Nand Flash�Ŀ�����controller��������������Ӳ��ģ�K�Ԍ��F(xi��n)������У�ͼm�e�ġ�
�҂����ӣ��nj�Nand Flash ���������ӣ�������Nand Flash оƬ���ӣ���骚����Nand FlashоƬ��һ����f���Ǻ���ֱ���Á��õģ���������Ӳ�����Ќ�����Ӳ����Nand Flash�Ŀ�������ȥ�����Ϳ���Nand Flash�������ṩ�r���̖���ṩӲ��ECCУ�ȵȹ��ܣ��҂���������ܛ������ȥ����Nand Flash�Ŀ�����
Ȼ���ɿ�����ȥ����Nand FlashоƬ�����F(xi��n)�҂���Ҫ�Ĺ��ܡ�
����Nand Flash�xȡ�;��̲������f��һ����С��λ��퓣�����Nand Flash��Ӳ���OӋ�r�Ϳ��]���@һ���ԣ�����ÿһƬ��Plane��������һ�������ą^(q��)���T���ڴ�ţ���Ҫ���뵽�����惦��Ԫ��ȥ�Ļ��߄��Ĵ惦��Ԫ���xȡ�����ģ�һ퓵Ĕ������@����������^(q��)�����|�Ͼ���һ������buffer������ֻ�Ǵ�̎datasheet����������퓼Ĵ���page register���ѣ����H���������퓾��棬���N��ԭ�⡣
�����������Щ�˲��˽�˃Ȳ��Y���������a��֮ǰ������ij�˵��`�⣬�Ԟ�ȴ�����Ĕ�����ͨ�^Nand Flash��FIFO�����뵽Nand Flash����ȥ�����Ԟ����̌��F(xi��n)�ˌ��H�������뵽�����惦��Ԫ���ˣ������H��ֻ�nj������@��퓾����У�ֻ�Ю����ٰl(f��)���ˌ����ľ��̵ڶ��A�εĴ_�J�����0x10��֮���H�ľ��̄������_ʼ�����_ʼ��퓾����еĔ�����һ�c�c���������惦��Ԫ��ȥ��
���w��ӛ�ĵط��ǣ����ڬF(xi��n)�ڳ�Ҋ��퓴�С��2K��Nand Flash���ljK�е�һ��퓵�oob��ʼλ�õĵ�1���ֹ�(ji��)���f��С��棬pagesize��512B����256B��Nand Flash���ĉK��ӛ�ǵ�6���ֹ�(ji��)�����������0xFF�����f���ljĉK�����������ǣ����������ĉK���õĉK���������Д�������0xFF�ġ�
���ډĉK�Ę�ӛ�����|�ϣ�Ҳֻ�nj�����flash�ϵ�ijЩ�ֹ�(ji��)�Ĕ����Ƿ�0xFF���ѣ����ԣ�ֻҪ�ǔ��������ǿ����xȡ�͌���ġ�Ҳ����ζ�������Ԍ�������ֵ��Ҳ�Ͱ��@���ĉK��ӛ��Ϣ�Ɖ��ˡ����ڳ��S�r�ĉĉK��һ���Dz����h����ӛ�õ���Ϣ�������ġ�
uboot���Ђ�������
nand scrub
�Ϳ��Ԍ��K�����еă��ݶ������ˣ������ĉK��ӛ����Փ�dz��S�r�ģ�߀�Ǻ��ʹ���^���г��F(xi��n)����ӛ�ġ�
nand erase
ֻ�����õĉK�������ѽ���ӛ�ĉK�ĉK����Ҫ�p�ײ���������t�ͺ��y�^(q��)����Щ�dz��S�r�͉ĵģ���Щ�Ǻ��ʹ���^�����Éĵ��ˡ�
NAND �ĉK�������ǻ��ډĉK��(BBT)�ģ�ͨ�^�@�������Rϵ�y(t��ng)�е����ЉĉK�����ԣ���ͬ�Ĺ�������֮�g�IJ����ͨ�^���ׂ����}���ҵ��𰸡�
Uboot ��Ŀǰʹ�����V���� bootloader�����ṩ�˃ɷN�p�����ĉK�����������ɷQ֮������ͺ��M�͡�ͨ�^�±����҂����Կ������ߵIJ��
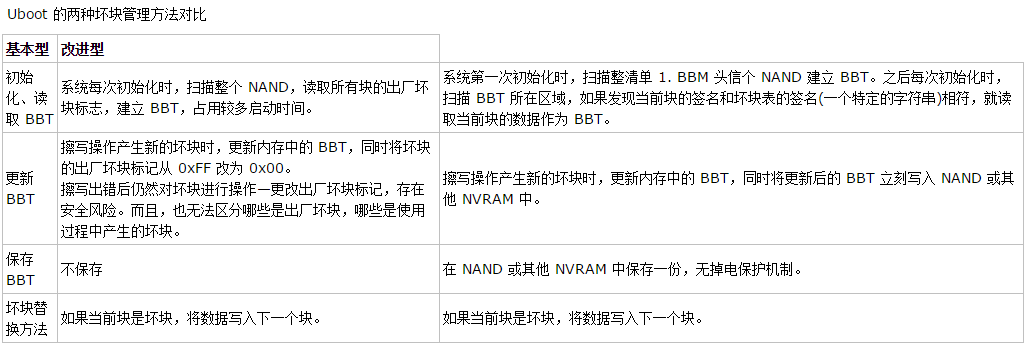
�mȻ uboot �ĸ��M�͉ĉK��������������һЩ���M��������Ȼ��������Ҫ��ȱ�c��
ᘌ��F(xi��n)�й���������ȱ�ݣ����������һ�N���Ӱ�ȫ��Ч�Ĺ��������������������������U���䌍�F(xi��n)ԭ����
���ȣ�ʹ��һ���y(t��ng)һ�Ă��úÉK�أ������д���� NAND �е�ģ�K�ṩ����Q�ĺÉK���@�ӣ��Ͳ���Ҫ��ÿ��ģ�K�������һ������^(q��)������� NAND �Ŀ��g�����ʡ�
���úÉK��ʾ��D
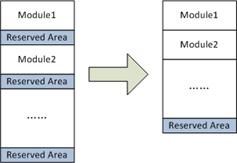
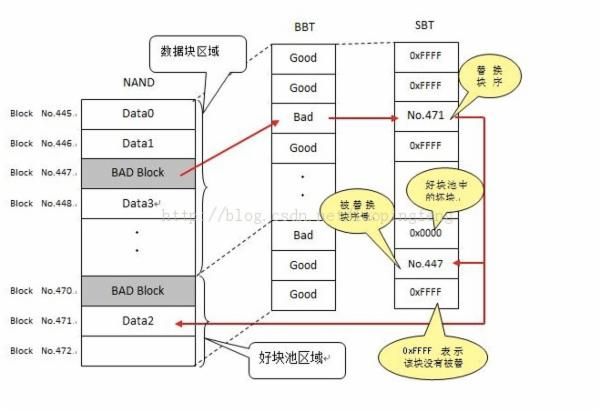
���ˌ��F(xi��n)���úÉK�أ���Ҫ����һ���ĉĉK���ÉK��ӳ�䣬���ԣ����� BBT ֮�⣬߀�趨�xһ����Q��(SBT)���@��һ�������x�� i ���K�Ĕ����r������l(f��)�F(xi��n) BBT ��ӛ�ԓ�K��ĉK����ȥ SBT �в�ԃ����Q�K��������� i ���K���e����Ҫ�� BBT �И�ӛԓ�K��ĉK��ͬ�r�ĺÉK���Ы@ȡһ���µĺÉK�����O����̖�� j��Ȼ�˺ÉK����̖ j ���� SBT �еĵ� i ���ֹ�(ji��)������ SBT �ĵ� j ���ֹ�(ji��)����̖ i��SBT �е��@�N�p��ӳ��ɴ_�������Ŀɿ��ԡ����⣬�ÉK���еĉKҲ�п��ܳɞ�ĉK���������r�l(f��)�F(xi��n)�ljĉK���t�� SBT �еČ���λ�Ø�ӛ�� 0x00��������ڌ����^���г��e���t������ SBT ����λ�Ø�ӛ 0x00 ֮�⣬߀Ҫ�����p��ӳ�䔵����
BBT/SBT ӳ��ʾ��D
���y(t��ng)�����H�z�� BBT ���ډK�ĺ��������x����ǰ�ׂ��ֹ�(ji��)��һ�������ַ����M�б��^�����һ�£����J�鮔ǰ�K�Ĕ����� BBT��Ȼ���xȡ������ BBT �������������� BBT �Ĕ�����У��� BBT ������ NAND �У���������Ч���ǿ��Եõ���C�ģ���� NAND ����������һ�㶼���������� ECC У���ǣ������������ʹ�õ� ECC �㷨Ҳ�H�H�ܼm��һ�� bit���l(f��)�F(xi��n) 2 �ɂ� bit ���e�`����� BBT �����������ě]�� ECC У�C�ƵĴ惦�w�У����� NOR Flash���]�Ќ� BBT �Ĕ����M��У��@Ȼ�Dz���ȫ�ġ�
���˸��ӿɿ����`�����C BBT/SBT ���������x�����@���Y���w������ BBM ��Ϣ��
BBM �^��Ϣ
typedef struct {
UINT8 acSignature[4];/* BBM ���� */
UINT32 ulBBToffset;/* BBT ƫ�� */
UINT32 ulSBToffset;/* SBT ƫ�� */
UINT16 usBlockNum;/* BBM ������ block ��Ŀ */
UINT16 usSBTstart;/* SBT ����λ�õ���ʼ block ��̖ */
UINT16 usSBtop;/* SBT top block */
UINT16 usSBnum;/* SBT number */
UINT32 ulBBTcrc;/* BBT ���� CRC �a */
UINT32 ulSBTcrc;/* SBT ���� CRC �a */
UINT32 ulHeadcrc;/* BBM �^��Ϣ CRC У�a */
} BBM_HEADBBT/SBT �ı�����ʽ

ʹ������ CRC У�C�ƣ��oՓ BBT �������ķN�惦�w�У������Ը��Ӈ������C��������Ч�ԡ�
���y(t��ng)�ķ����H����һ�� BBT ����������ڌ� BBT �rϵ�y(t��ng)��늣��t BBT �Gʧ��ϵ�y(t��ng)�����ܟo���������ӻ������鰲ȫ��Ҋ����������������ͬ�r����������ݣ�����ڌ�ij����ݕr��늣��t߀�Ѓɂ���õĂ�ݡ���ĵ���r�ǣ�����ڌ���һ����ݕr��늣��t��ǰ���µ�һ���ĉK��Ϣ�Gʧ��
�xȡ�ĉK��r������xȡ������ݣ�����l(f��)�F(xi��n)������ݵĔ�����һ�£���ӛ䛵ĉĉK�����Ă�ݞ鮔ǰ����Ч��ݣ�ͬ�r���̸�������ɂ�ݡ�
���Ľ�B��NandFlash���A֪�R�͎�� NAND �ĉK����������ָ���� uboot ���p��������������ȱ�ݣ������һ�N���M�ķ���������� NAND �������ʼ��ĉK�����İ�ȫ�ԣ��Ɍ�Ƕ��ʽ�_�l(f��)���кܺõĽ��b���á�
ECCУ���һ�N�ȴ�m�eԭ�������DZ��^���M�ăȴ��e�`�z��������ֶΡ�ECC�ȴ漴�m�e�ȴ棬���ε��f������аl(f��)�F(xi��n)�e�`���m���e�`�Ĺ��ܣ�һ��������ڸߙn�_ʽ��X/���������D�ι���վ�ϣ��@��ʹ������Xϵ�y(t��ng)�ڹ����r��څ�ڰ�ȫ��(w��n)����
�ȴ���һ�N������������乤���^�����y������F(xi��n)�e�`�������ڷ�(w��n)����Ҫ��ߵ��Ñ���f���ȴ��e�`���ܕ����������ԵĆ��}���ȴ��e�`������ԭ��߀�ɷ֞�Ӳ�e�`��ܛ�e�`��Ӳ���e�`������Ӳ���ēp����ȱ����ɵģ���˔������Dz����_������e�`�ǟo���m���ģ�ܛ�e�`���S�C���F(xi��n)�ģ������ڃȴ渽��ͻȻ���F(xi��n)��Ӹɔ_�����ض�������Ƀȴ�ܛ�e�`�İl(f��)����
�����ܙz�y�ͼm���ȴ�ܛ�e�`����ECC���g���F(xi��n)֮ǰ�����ȳ��F(xi��n)���ǃȴ桰��żУParity�������ȴ�����С�Ć�λ�DZ��أ�Ҳ�Q�顰λ��bit������λ��ֻ�ЃɷN��B(t��i)�քe��1��0���ʾ��ÿ8���B�m(x��)�ı��ؽ���һ���ֹ�(ji��)��byte����������żУ�ăȴ�ÿ���ֹ�(ji��)ֻ��8λ�������ijһλ�惦���e�`��ֵ���͕�������惦�����������l(f��)��׃�����M�������ó���l(f��)���e�`������żУ������ÿһ�ֹ�(ji��)��8λ��֮����������һλ�����e�`�z�yλ����ij�ֹ�(ji��)�д惦����֮������8��λ�ϴ惦�Ĕ����ǹ̶��ģ����λֻ���ЃɷN��B(t��i)1��0�����O�惦�Ĕ�����λ��ʾ��1��1��1��0��0��1��0��1����ô��ÿ��λ��ӣ�1+1+1+0+0+1+0+1=5�����Y�����攵������żУУ�λ�Ͷ��x��1����֮�t��0��������У�t�෴����CPU�xȡ�惦�Ĕ����r�������ٴΰ�ǰ8λ�д惦�Ĕ�����ӣ�Ӌ��Y���Ƿ��cУ�λ��һ�¡��Ķ�һ���̶����ܙz�y���ȴ��e�`����żУ�ֻ�ܙz�y���e�`���o�������M��������ͬ�r�mȻ�pλͬ�r�l(f��)���e�`�ĸ����ஔ�ͣ���żУ�s�o���z�y���pλ�e�`��
ͨ�^����ķ����҂�֪��Parity�ȴ���ͨ�^��ԭ�픵��λ�Ļ��A������һ������λ��z�鮔ǰ8λ���������_�ԣ����S������λ������Parity�Á�z�Ĕ���λҲ�ɱ����ӣ������f������λ��16λ�r����Ҫ����2λ���ڙz�飬������λ��32λ�r�t������4λ��������ơ��e�Ǯ��������dz���r���������e�Ď���Ҳ��Խ����ֻ�ܼm�������e�`����ż�z�ķ������@�����������ˣ����ǻ����@��һ�N��r��һ�N�µăȴ漼�g���ʶ����ˣ��@����ECC���e�`�z��ͼm�������@�N���gҲ����ԭ���Ĕ���λ�����У�λ�팍�F(xi��n)�ġ���ͬ���ǃ������ӵķ�����һ�ӣ��@Ҳ�͌����˃��ߵ���Ҫ���ܲ�̫һ�ӡ����cParity��ͬ�����������λ��8λ���t��Ҫ����5λ���M��ECC�e�`�z��ͼm��������λÿ����һ����ECCֻ����һλ�z�λ��Ҳ�����f������λ��16λ�rECCλ��6λ��32λ�rECCλ��7λ������λ��64λ�rECCλ��8λ��������ƣ�����λÿ����һ����ECCλֻ����һλ����֮���ڃȴ���ECC�܉����S�e�`�������Ԍ��e�`������ʹϵ�y(t��ng)���Գ��m(x��)�����IJ������������e�`���Д࣬��ECC�����ԄӸ��������������Ԍ�Parity�o���z��������e�`λ��������e�`������
ECC��Error Checking and Correcting���e�`�z��ͼm�����ȴ棬��ͬ��Ҳ���ڔ���λ���~���λ�惦һ���Ô������ܵĴ��a��������������ȴ棬������ECC���a�c��ͬ�rҲ�����������������x���Ŵ惦�Ĕ����r����������ECC���a�͕����x�����r�a����ECC���a�����^������ɂ����a����ͬ�������t������a���Դ_�������е���һλ�Dz����_�ġ�Ȼ���@һ�e�`λ�����������ȴ�������t��ጷų����_�Ĕ��������m���Ĕ������ٕ����Żȴ档������ͬ���e�`�����ٴα��x�����t�m���^���ٴα���(zh��)�С��،�����������̎���^�̵��_�N���@�ӄt������ϵ�y(t��ng)���ܵ����@���͡�������S�C�¼����ǃȴ��ȱ�c�a�����e�`���t�@һ�ȴ��ַ���e�`���������ٴΌ��������������ȡ����

�ߴa�Pע�҂�
�]�䣺ivy@yingtexin.net
��ַ�����������A�^(q��)���νֵ����δ��973�f�����S��(chu��ng)�I(y��)�@A��2��A09


ϵ�ͷ�")
ϵ�ͷ�")
ϵ�ͷ�")
ϵ�ͷ�")
