





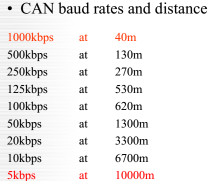
║ĮĒśąŠŲ¼HK32F103CANĄ─“īäėæ¬ė├
║ĮĒśąŠŲ¼HK32F103ŽĄ┴ą╩Ūę╗┐Ņ╣”─▄ÅŖ┤¾Ą─32bit MCUŻ¼ā╚▓┐╝»│╔ČÓéĆ═©ą┼─ŻēKŻ¼ŲõųąCAN─ŻēKų¦│ųCANģf(xi©”)ūh2.0A║═2.0BĪŻ─┐Ū░ÅVĘ║æ¬ė├Ą─╩ŪCAN 2.0Bģf(xi©”)ūhŻ¼Ųõ╩š░l(f©Ī)öĄ(sh©┤)ō■(j©┤)╦┘Č╚Ė▀▀_1MbpsŻ¼ėąā╔ĘN▓╗═¼ķLČ╚Ą─IDś╦ūRĘ¹Ż¼Ęųäe╩Ū11╬╗║═29╬╗Ą─ĪŻ
HK32F103ŽĄ┴ąCANĮė┐┌ģf(xi©”)ūhĄ─ų„ę¬╠ž³cŻ║
(1) ČÓų„┐žųŲŻ║
┐éŠĆ┐šķeĢrŻ¼╦∙ėąĄ─å╬į¬Š∙┐╔ķ_╩╝░l(f©Ī)╦═Ž¹ŽóĪŻ
(2) Ž¹ŽóĄ─░l(f©Ī)╦═Ż║
į┌ CAN ģf(xi©”)ūhųąŻ¼╦∙ėąĄ─Ž¹ŽóČ╝ęį╣╠Č©Ą─Ė±╩Į░l(f©Ī)╦═Ż¼┐éŠĆ┐šķeĢrŻ¼╦∙ėą┼c┐éŠĆŽÓ▀BĄ─å╬į¬Č╝┐╔ęįķ_╩╝░l(f©Ī)╦═ą┬Ž¹ŽóĪŻā╔éĆęį╔ŽĄ─å╬į¬═¼Ģrķ_╩╝░l(f©Ī)╦═Ž¹ŽóĢrŻ¼Ė∙ō■(j©┤)ś╦ūRĘ¹Ż© Identifier ęįŽ┬ĘQ×ķ IDŻ®øQČ©ā×(y©Łu)Ž╚╝ēĪŻ ID ▓ó▓╗╩Ū▒Ē╩Š░l(f©Ī)╦═Ą──┐Ą─ĄžųĘŻ¼Č°╩Ū▒Ē╩ŠįLå¢┐éŠĆĄ─Ž¹ŽóĄ─ā×(y©Łu)Ž╚╝ēĪŻā╔éĆęį╔ŽĄ─å╬į¬═¼Ģrķ_╩╝░l(f©Ī)╦═Ž¹ŽóĢrŻ¼ī”Ė„Ž¹ŽóIDĄ─├┐éĆ╬╗▀MąąųéĆų┘▓├▒╚▌^ĪŻų┘▓├½@ä┘Ż©▒╗┼ąČ©×ķā×(y©Łu)Ž╚╝ēūŅĖ▀Ż®Ą─å╬į¬┐╔└^└m(x©┤)░l(f©Ī)╦═Ž¹ŽóŻ¼ų┘▓├╩¦└¹Ą─å╬į¬ät┴ó┐╠═Żų╣░l(f©Ī)╦═Č°▀MąąĮė╩š╣żū„ĪŻ╝┤ČÓéĆå╬į¬═¼Ģrķ_╩╝░l(f©Ī)╦═ĢrŻ¼░l(f©Ī)╦═Ė▀ā×(y©Łu)Ž╚╝ē ID Ž¹ŽóĄ─å╬į¬┐╔½@Ą├░l(f©Ī)╦═ÖÓĪŻ
(3) ŽĄĮy(t©»ng)Ą─╚ß▄øąįŻ║
┼c┐éŠĆŽÓ▀BĄ─CAN╣Ø(ji©”)³cø]ėąŅÉ╦Ųė┌Ī░ĄžųĘĪ▒Ą─ą┼ŽóĪŻę“┤╦į┌┐éŠĆ╔Žį÷╝ėCAN╣Ø(ji©”)³cĢrŻ¼▀BĮėį┌┐éŠĆ╔ŽĄ─Ųõ╦³CAN╣Ø(ji©”)³cĄ─▄øė▓╝■╝░æ¬ė├īėČ╝▓╗ąĶę¬Ė─ūāĪŻ
(4) ═©ą┼╦┘Č╚Ż║
Ė∙ō■(j©┤)š¹éĆŠW(w©Żng)ĮjĄ─ęÄ(gu©®)─ŻŻ¼┐╔įOČ©▀m║ŽĄ─═©ą┼╦┘Č╚ĪŻį┌═¼ę╗ŠW(w©Żng)ĮjųąŻ¼╦∙ėąCAN╣Ø(ji©”)³c▒žĒÜįOČ©│╔Įy(t©»ng)ę╗Ą─═©ą┼╦┘Č╚ĪŻ╝┤╩╣ėąę╗éĆCAN╣Ø(ji©”)³cĄ─═©ą┼╦┘Č╚┼cŲõ╦³Ą─▓╗ę╗śėŻ¼┤╦CAN╣Ø(ji©”)³cę▓Ģ■▌ö│÷Õeš`ą┼╠¢Ż¼Ę┴ĄKš¹éĆŠW(w©Żng)ĮjĄ─═©ą┼ĪŻ▓╗═¼ŠW(w©Żng)Įjķgät┐╔ęįėą▓╗═¼Ą─═©ą┼╦┘Č╚ĪŻ
(5) Õeš`Öz£y╣”─▄ĪżÕeš`═©ų¬╣”─▄ĪżÕeš`╗ųÅ═╣”─▄Ż║
╦∙ėąĄ─CAN╣Ø(ji©”)³cČ╝┐╔ęįÖz£yÕeš`Ż©Õeš`Öz£y╣”─▄Ż®
(6) ▀h│╠öĄ(sh©┤)ō■(j©┤)šłŪ¾Ż║
╦∙ėąĄ─CAN╣Ø(ji©”)³cČ╝┐╔ęįÖz£yÕeš`Ż©Õeš`Öz£y╣”─▄Ż®
Öz£y│÷Õeš`Ą─CAN╣Ø(ji©”)³cĢ■┴ó╝┤═¼Ģr═©ų¬Ųõ╦¹╦∙ėąCAN╣Ø(ji©”)³cŻ©Õeš`═©ų¬╣”─▄Ż®
š²į┌░l(f©Ī)╦═Ž¹ŽóĄ─CAN╣Ø(ji©”)³cę╗Ą®Öz£y│÷Õeš`Ż¼Ģ■ÅŖųŲĮY╩°«öŪ░Ą─░l(f©Ī)╦═ĪŻÅŖųŲĮY╩°░l(f©Ī)╦═Ą─CAN╣Ø(ji©”)³cĢ■▓╗öÓĘ┤Å═ųžą┬░l(f©Ī)╦═┤╦Ž¹Žóų▒ĄĮ│╔╣”░l(f©Ī)╦═×ķų╣Ż©Õeš`╗ųÅ═╣”─▄Ż®ĪŻ
(7) ╣╩šŽĘŌķ]Ż║
CAN ┐╔ęį┼ąöÓ│÷Õeš`Ą─ŅÉą═╩Ū┐éŠĆ╔ŽĢ║ĢrĄ─öĄ(sh©┤)ō■(j©┤)Õeš`Ż©╚ń═Ō▓┐įļ┬ĢĄ╚Ż®▀Ć╩Ū│ų└m(x©┤)Ą─öĄ(sh©┤)ō■(j©┤)Õeš`Ż©╚ńå╬į¬ā╚▓┐╣╩šŽĪó“īäėŲ„╣╩šŽĪóöÓŠĆĄ╚Ż®ĪŻė╔┤╦╣”─▄Ż¼«ö┐éŠĆ╔Ž░l(f©Ī)╔·│ų└m(x©┤)öĄ(sh©┤)ō■(j©┤)Õeš`ĢrŻ¼┐╔īóę²Ų┤╦╣╩šŽĄ─CAN╣Ø(ji©”)³cÅ─┐éŠĆ╔ŽĖ¶ļx│÷╚źĪŻ
(8) ╬╗╠Ņ│õŻ║ CAN═©ą┼Ą─═¼▓Įą┼Žó░³║¼ė┌é„▌ööĄ(sh©┤)ō■(j©┤)ųąŻ¼ļŖŲĮĄ─╠°▐D╠ß╣®┴╦═¼▓Įą┼ŽóŻ¼╚ń╣¹▀B└m(x©┤)ČÓéĆŽÓ═¼Ą─┐éŠĆųĄ│÷¼F(xi©żn)Ż¼▀@īóė░ĒæĄĮ═¼▓Įą┼ŽóĄ─╠ß╚ĪĪŻ×ķ┤╦CAN▓╔ė├╬╗╠Ņ│õęÄ(gu©®)ätŻ¼╝┤į┌ę╗ļųąĄ─ļŲ╩╝Ż¼ų┘▓├ł÷Ż¼┐žųŲł÷Ż¼öĄ(sh©┤)ō■(j©┤)ł÷║═CRCł÷▓┐ĘųŻ© CRCĮńČ©Ę¹Ż¼æ¬┤ļ║═ļĮY╩°│²═ŌŻ®Ż¼«ö░l(f©Ī)╦═Ų„Öz£yĄĮ5éĆŠ▀ėąŽÓ═¼öĄ(sh©┤)ųĄĄ─▀B└m(x©┤)╬╗ĢrŻ¼īóūįäė▓Õ╚ļę╗éĆča┤a╬╗ĪŻĮė╩š╣Ø(ji©”)³c╩šĄĮ5éĆ▀B└m(x©┤)╬╗║¾Ž┬ę╗╬╗ūįäėäh│²ĪŻ
(9) ▀BĮėŻ║
CAN ┐éŠĆ╩Ū┐╔═¼Ģr▀BĮėČÓéĆCAN╣Ø(ji©”)³cĄ─┐éŠĆĪŻ┐╔▀BĮėĄ─╣Ø(ji©”)³c┐éöĄ(sh©┤)└Ēšō╔Ž╩Ūø]ėąŽ▐ųŲĄ─ĪŻĄ½īŹļH╔Ž┐╔▀BĮėĄ─╣Ø(ji©”)³cöĄ(sh©┤)╩▄┐éŠĆ╔ŽĄ─Ģrķgčė▀t╝░ļŖÜŌžō▌dĄ─Ž▐ųŲĪŻĮĄĄ══©ą┼╦┘Č╚Ż¼┐╔▀BĮėĄ─CAN╣Ø(ji©”)³cöĄ(sh©┤)į÷╝ėŻ╗╠ßĖ▀═©ą┼╦┘Č╚Ż¼ät┐╔▀BĮėĄ─CAN╣Ø(ji©”)³cöĄ(sh©┤)£p╔┘ĪŻ╚ńŽ┬╩ŪCAN═©ą┼╦┘Č╚║═ŠÓļxī”æ¬łDŻ║
(9) CAN┐éŠĆ╬’└Ē┐“╝▄┐╔ęį│ķŽ¾×ķŻ║
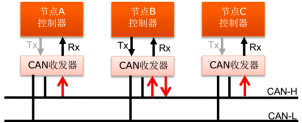
MCUŻ©╬ó╠Ä└ĒŲ„Ż® <--> CAN┐žųŲŲ„ <--> CAN╩š░l(f©Ī)Ų„ <--> CANöĄ(sh©┤)ō■(j©┤)é„▌ö┐éŠĆŻ©CAN-H,CAN-LŻ®ĪŻ╚ńŽ┬╦∙╩ŠŻ║
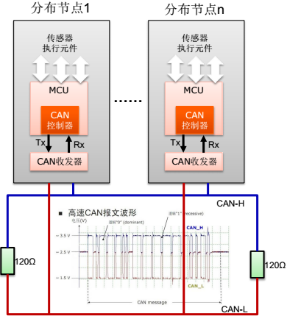
CAN┐éŠĆĄ─öĄ(sh©┤)ō■(j©┤)é„▌öŠĆĪ¬Ī¬>ā╔ŚlļpŽ“öĄ(sh©┤)ō■(j©┤)ŠĆŻ¼Ęų×ķĖ▀╬╗®zCAN-H®{║═Ą═╬╗®zCAN-L®{öĄ(sh©┤)ō■(j©┤)ŠĆŻ¼ ×ķ┴╦Ę└ų╣═ŌĮńļŖ┤┼▓©Ė╔ö_║═Ž“═Ō▌Ś╔õŻ¼ā╔ŚlöĄ(sh©┤)ō■(j©┤)ŠĆ└p└@į┌ę╗ŲŻ¼ę¬Ū¾ų┴╔┘├┐ 2.5cm Š═ę¬┼żĮgę╗┤╬Ż¼ā╔ŚlŠĆ╔ŽĄ─ļŖ╬╗╩ŪŽÓĘ┤Ą─Ż¼ļŖē║Ą─║═┐éĄ╚ė┌│ŻųĄĪŻ
CAN┐éŠĆĄ─ĮKČ╦ļŖūĶĪ¬Ī¬>Ę└ų╣öĄ(sh©┤)ō■(j©┤)į┌ĄĮ▀_ŠĆ┬ĘĮKČ╦║¾Ž¾╗ž┬Ģę╗śėĘĄ╗žŻ¼▓óę“┤╦Č°Ė╔ö_įŁ╩╝öĄ(sh©┤)ō■(j©┤)Ż¼Å─Č°▒ŻūC┴╦öĄ(sh©┤)ō■(j©┤)Ą─š²┤_é„╦═Ż¼ĮKČ╦ļŖūĶčbį┌┐žųŲå╬į¬ā╚ĪŻ
CAN┐éŠĆļŅÉą═Ż║
öĄ(sh©┤)ō■(j©┤)ļ-Data frame
öyĦöĄ(sh©┤)ō■(j©┤)Å─░l(f©Ī)╦═╣Ø(ji©”)³cĄĮĮė╩š╣Ø(ji©”)³cĪŻ
Ęų×ķś╦£╩ļŻ©11╬╗ś╦ūRĘ¹Ż®║═öUš╣ļŻ©29╬╗ś╦ūRĘ¹Ż®ĪŻ
▀h│╠ļ-Remote frame
Ž“Ųõ╦¹╣Ø(ji©”)³cšłŪ¾░l(f©Ī)╦═Š▀ėą═¼ę╗ś╦ūRĘ¹Ą─öĄ(sh©┤)ō■(j©┤)ļ, ▀h│╠ļę▓ėąś╦£╩ļ║═öUš╣ļā╔ĘNĖ±╩ĮĪŻ
└²╚ńCAN╣Ø(ji©”)³cAąĶę¬ų¬Ą└CAN╣Ø(ji©”)³cBĄ─ė═£ž£žČ╚Ż¼CAN╣Ø(ji©”)³cA░l(f©Ī)╦═ę╗éĆ▀h│╠ļĮo╣Ø(ji©”)³cBŻ¼╣Ø(ji©”)³cB╩šĄĮįō▀h│╠ļ║¾░l(f©Ī)╦═ę╗éĆĦė═£žöĄ(sh©┤)ō■(j©┤)Ą─öĄ(sh©┤)ō■(j©┤)ļĮo╣Ø(ji©”)³cAĪŻ
Õeš`ļ-Error frame
╣Ø(ji©”)³cÖz£yĄĮÕeš`ų«║¾░l(f©Ī)╦═Õeš`ļĪŻ
Õeš`ś╦ųŠ: ų„äėÕeš`ś╦ųŠŻ©000000Ż®║═▒╗äėÕeš`ś╦ųŠŻ©111111Ż®ĪŻ
Õeš`ĮńČ©Ę¹:11111111ĪŻ
▀^▌dļ-Overload frame
Įė╩š╣Ø(ji©”)³c═©ų¬Ųõ╔ą╬┤ū÷║├Įė╩š£╩éõ, ▀^▌dś╦ųŠŻ©▀^▌dś╦ųŠųž»B▓┐ĘųŻ®+▀^▌dś╦ųŠĮńČ©Ę¹ĪŻ
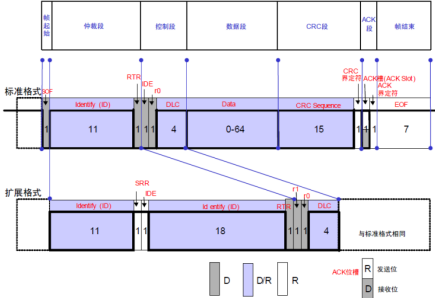
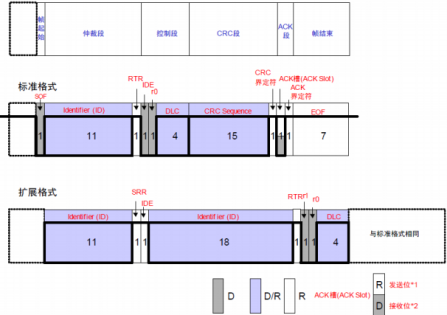
ęįŽ┬╩ŪĻPė┌CANļ/ł¾╬─ųąĖ„éĆ▓┐ĘųĄ─šf├„Ż║
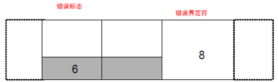
ļŲ╩╝Ż║SOF
0Ż¼š╝ė├1╬╗ĪŻ«ö┐éŠĆ┐šķeĢr░l(f©Ī)╦═Ż¼ė├ė┌CAN┐éŠĆ╔ŽĄ─├┐éĆ╣Ø(ji©”)³cĄ─ą┼Žó═¼▓ĮĪŻ
ų┘▓├Č╬Ż║ID+RTR
ID:
▒Ē╩ŠöĄ(sh©┤)ō■(j©┤)ļĄ─ā×(y©Łu)Ž╚╝ēŻ¼Ž╚░l(f©Ī)╦═Ė▀╬╗į┘░l(f©Ī)╦═Ą═╬╗ĪŻ 11╬╗╗“29╬╗ķLČ╚ĪŻ
RTR(Remote Transmit Request):
0: ▒Ē╩ŠįōCANļ╩ŪöĄ(sh©┤)ō■(j©┤)ļĪŻ
1: ▒Ē╩ŠįōCANļ╩Ū▀h│╠ļĪŻ
┐žųŲČ╬Ż║IDE+r0+DLC
IDE(IDentifier Extension):
0: ś╦£╩Ė±╩ĮĪŻ
1: öUš╣Ė±╩ĮĪŻ
▒Ż┴¶╬╗r0:
0ĪŻ
▒Ż┴¶╬╗r1:
0ĪŻ
DLC(Data Length Code):
▒Ē╩ŠöĄ(sh©┤)ō■(j©┤)ė“ųąĄ─ūų╣Ø(ji©”)öĄ(sh©┤)Ż¼ĘČć·Ż░Ī½ŻĖ.
öĄ(sh©┤)ō■(j©┤)Č╬Ż║Data
CRCČ╬Ż║CRC Sequence+CRCĮńČ©Ę¹
CRC polynomial:
x15+x14+x10+x8+x7+x4+x3+1
CRCĮńČ©Ę¹:
1.
ACKČ╬Ż║ACK Slot+ACKĮńČ©Ę¹
Įė╩šĄĮŲź┼õCRCą“┴ąĄ─╣Ø(ji©”)³cĢ■į┌æ¬┤╬╗Ų┌ķgŻ¼īæ0į┌░l(f©Ī)╦═Ų„Ą─ļ[ąį╬╗ū„×ķ╗žæ¬ĪŻ
ACKĮńČ©Ę¹:
1.
ļĮY╩°Ż║EOF
1111111,▒Ē╩ŠöĄ(sh©┤)ō■(j©┤)ļ╗“▀h│╠ļĄ─ĮY╩°ĪŻ
SRR(Substitute Remote Request):
1, öUš╣ļųą┤·╠µRTR╬╗.
CAN┐éŠĆ═©ą┼ÖCųŲĪ¬ł¾╬─░l(f©Ī)╦═
-▌d▓©é╔┬Ā║═Ħø_═╗Öz£yģf(xi©”)ūhĄ─ČÓ┬ĘįLå¢Ż© CSMA/CDŻ®
-░l(f©Ī)╦═╣Ø(ji©”)³cŻ║╗žūxŻ╗
Įė╩š╣Ø(ji©”)³cŻ║▒O(ji©Īn)┬Ā
-ŠĆ┼cÖCųŲŻ║
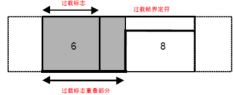
╦∙ėą╣Ø(ji©”)³c░l(f©Ī)╦═1Ż¼┐éŠĆ╔Ž▓┼╩Ū1Ż╗ėąę╗éĆ╣Ø(ji©”)³c░l(f©Ī)╦═0Ż¼┐éŠĆ╔ŽŠ═╩Ū0Ż¼╝┤Ė▀ļŖŲĮ╩Ūļ[ąį╬╗Ż¼Ą═ļŖŲĮ╩Ū’@ąį╬╗ĪŻ
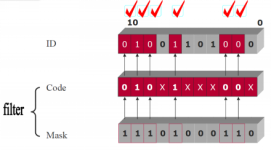
-┐éŠĆų┘▓├Ż║╚ń╣¹ėąā╔éĆ╗“ā╔éĆęį╔ŽĄ─╣Ø(ji©”)³c═¼ĢrŽ“┐éŠĆ╔Ž░l(f©Ī)╦═öĄ(sh©┤)ō■(j©┤)Ż¼ś╦ūRĘ¹ąĪĄ─½@Ą├ų┘▓├Ż¼ś╦ūRĘ¹┤¾Ą─═╦│÷ų┘▓├Ż©╗žūx║═ŠĆ┼cŻ®ĪŻ
└²╚ńŻ║
ID1:00000000010
ID2:00000000001
CAN┐éŠĆ═©ą┼ÖCųŲĪ¬ł¾╬─Įė╩š
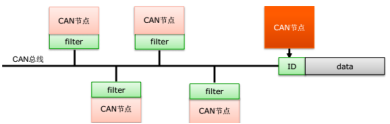
╚ń╣¹┐éŠĆ╔ŽėąöĄ(sh©┤)ō■(j©┤)š²į┌░l(f©Ī)╦═Ż¼╦∙ėą╣Ø(ji©”)³cČ╝Ģ■Įė╩š┐éŠĆöĄ(sh©┤)ō■(j©┤)Ż¼ų╗ėą═©▀^Įė╩š╣Ø(ji©”)³cĄ─ł¾╬─▀^×VęÄ(gu©®)ät▓┼─▄▒╗╣Ø(ji©”)³cĮė╩š▀M┐žųŲŲ„ĪŻ
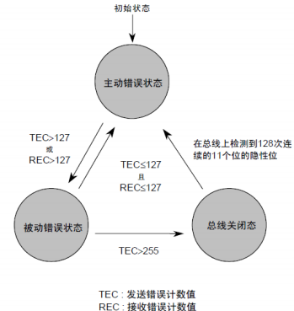
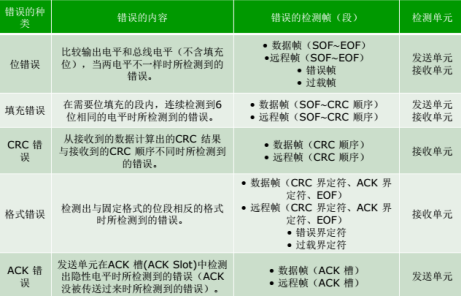
CANĄ─Õeš`ĀŅæB(t©żi)Ż║
ų„äėÕeš`ĀŅæB(t©żi)Ż║ų„äėÕeš`ĀŅæB(t©żi)╩Ū┐╔ęįš²│Żģó╝ė┐éŠĆ═©ą┼Ą─ĀŅæB(t©żi)ĪŻ╠Äė┌ų„äėÕeš`ĀŅæB(t©żi)Ą─å╬į¬Öz£y│÷Õeš`ĢrŻ¼▌ö│÷ų„äėÕeš`ś╦ųŠĪŻ
▒╗äėÕeš`ĀŅæB(t©żi)Ż║ ▒╗äėÕeš`ĀŅæB(t©żi)╩Ūęūę²ŲÕeš`Ą─ĀŅæB(t©żi)ĪŻ ╠Äė┌▒╗äėÕeš`ĀŅæB(t©żi)Ą─å╬į¬Öz£y│÷Õeš`ĢrŻ¼▌ö│÷▒╗äėÕeš`ś╦ųŠĪŻ╠Äė┌▒╗äėÕeš`ĀŅæB(t©żi)Ą─å╬į¬╝┤╩╣Öz£y│÷Õeš`Ż¼Č°Ųõ╦³╠Äė┌ų„äėÕeš`ĀŅæB(t©żi)Ą─å╬į¬╚ń╣¹ø]░l(f©Ī)¼F(xi©żn)Õeš`Ż¼š¹éĆ┐éŠĆę▓▒╗šJ×ķ╩Ūø]ėąÕeš`Ą─ĪŻ
┐éŠĆĻPķ]ĀŅæB(t©żi)Ż║┐éŠĆĻPķ]æB(t©żi)╩Ū▓╗─▄ģó╝ė┐éŠĆ╔Ž═©ą┼Ą─ĀŅæB(t©żi)ĪŻą┼ŽóĄ─Įė╩š║═░l(f©Ī)╦═Š∙▒╗Į¹ų╣ĪŻ
Õeš`ŅÉą═Ż║
¼F(xi©żn)į┌ęį║ĮĒśąŠŲ¼Ą─HK32F103VET6(LQFP-100)×ķ└²üĒšf├„CAN═©ą┼Ą─“īäėīŹ¼F(xi©żn)ĪŻHK32F103VET6╩Ū║ĮĒśąŠŲ¼Ą─ę╗┐Ņ╣”─▄ÅŖ┤¾Ą─32╬╗MCUŻ¼ā╚▓┐╝»│╔CAN┐žųŲŲ„Ż¼ę“┤╦▀MąąCAN═©ą┼ĢrŻ¼ų╗ąĶę¬═ŌĮėę╗éĆCAN╩š░l(f©Ī)Ų„ĪŻ
ė╔HK32F103ąŠŲ¼Ą─datasheetŻ¼╚ńŽ┬ĮžłD╬ęéāĄ├ų¬Ż¼CANĄ─░l(f©Ī)╦═ę²─_×ķPA12Ż¼Įė╩šę²─_×ķPA11ĪŻ

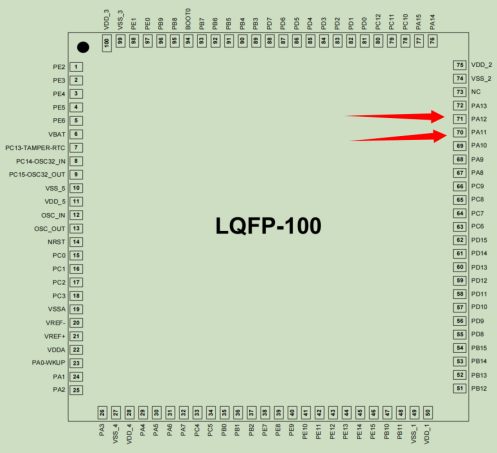
ė╔HK32F103ąŠŲ¼Ą─ė├æ¶╩ųāįŻ¼╚ńŽ┬ĮžłDŻ¼Ą├ų¬ąĶę¬░čCANĄ─░l(f©Ī)╦═ę²─_PA12įOų├×ķ═Ų═ņÅ═ė├▌ö│÷Ż¼CANĄ─Įė╩šę²─_PA11įOų├×ķĖĪ┐š▌ö╚ļ╗“╔Ž└Ł▌ö╚ļĪŻ
įö╝ÜĄ─GPIO┼õų├Ż¼ę└ō■(j©┤)įōąŠŲ¼Ą─ė├æ¶╩ųāįĄ─▒Ē8-1Ż║
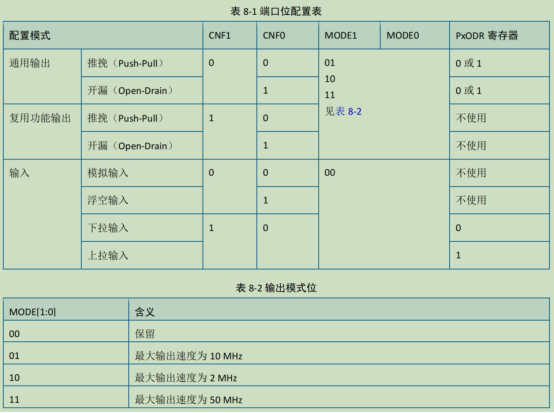
ę“┤╦Ż¼▄ø╝■ųąī”ę²─_Ą─įOų├╚ńŽ┬Ż║
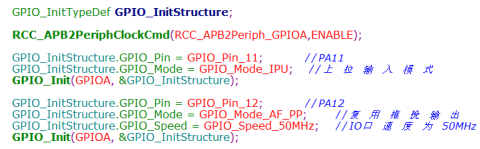
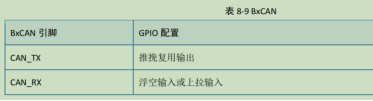
▀@└’Ż¼╬ęéā╩╣ė├TJA1050ū„×ķCAN╩š░l(f©Ī)Ų„Ż¼įŁ└Ē╩ŠęŌłD╚ńŽ┬Ż║
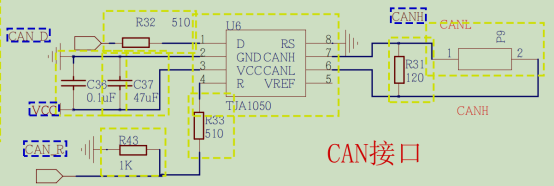
īóCAN_D▀BĮėHK32F103VET6ąŠŲ¼Ą─ę²─_PA12Ż¼CAN_R▀BĮėHK32F103VET6ąŠŲ¼Ą─ę²─_PA11Ż¼CANL║═CANHĮė═Ō▓┐CAN┐éŠĆŻ©╝┤Ū░╬─╠ߥĮĄ─CAN-L║═CAN-HŻ®ĪŻ
▄ø╝■“īäėĘĮ├µŻ¼╩ūŽ╚æ¬įō╩╣─▄CAN─ŻēKĄ─ĢrńŖŻ¼╚ńŽ┬Ż║
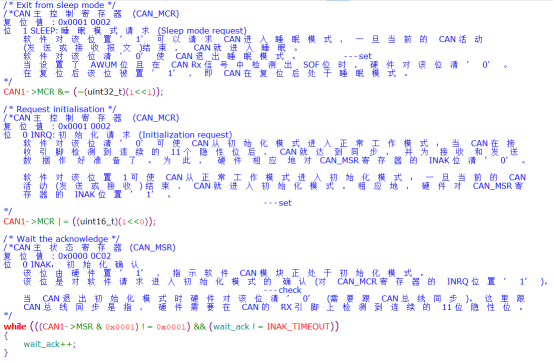
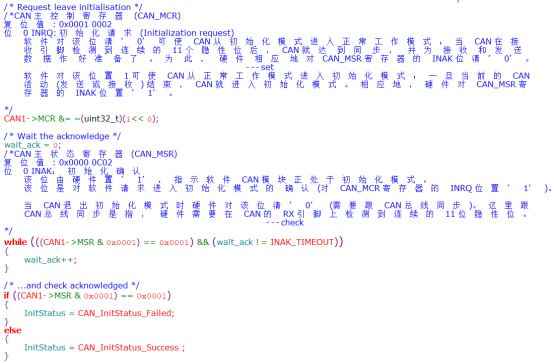
HK32F103VET6ąŠŲ¼CAN─ŻēKŻ©║¾└m(x©┤)╬ęéā║åĘQŲõ×ķbxCANŻ®ėą3éĆų„ꬥ─╣żū„─Ż╩ĮŻ║│§╩╝╗»Īóš²│Ż║═╦»├▀─Ż╩ĮĪŻį┌ė▓╝■Å═╬╗║¾Ż¼bxCAN ╣żū„į┌╦»├▀─Ż╩Įęį╣Ø(ji©”)╩ĪļŖ─▄Ż¼═¼Ģr CANTX ę²─_Ą─ā╚▓┐╔Ž└ŁļŖūĶ▒╗╝ż╗ŅĪŻ▄ø╝■═©▀^ī” CAN_MCR ╝─┤µŲ„Ą─INRQ╗“SLEEP ╬╗ų├Ī»1Ī»Ż¼┐╔ęįšłŪ¾ bxCAN ▀M╚ļ│§╩╝╗»╗“╦»├▀─Ż╩ĮĪŻę╗Ą®▀M╚ļ┴╦│§╩╝╗»╗“╦»├▀─Ż╩ĮŻ¼bxCAN Š═ī” CAN_MSR ╝─┤µŲ„Ą─ INAK ╗“ SLAK ╬╗ų├Ī»1Ī»üĒ▀Mąą┤_šJŻ¼═¼Ģrā╚▓┐╔Ž└ŁļŖūĶ▒╗Į¹ė├ĪŻ«öINAK ║═ SLAK ╬╗Č╝×ķĪ»0Ī»ĢrŻ¼bxCAN Š═╠Äė┌š²│Ż─Ż╩ĮĪŻį┌▀M╚ļš²│Ż─Ż╩ĮŪ░Ż¼bxCAN ▒žĒÜĖ· CAN ┐éŠĆ╚ĪĄ├═¼▓ĮŻ╗×ķ╚ĪĄ├═¼▓ĮŻ¼bxCAN ꬥ╚┤² CAN ┐éŠĆ▀_ĄĮ┐šķeĀŅæB(t©żi)Ż¼╝┤į┌ CANRX ę²─_╔Ž▒O(ji©Īn)£yĄĮ 11 éĆ▀B└m(x©┤)Ą─ļ[ąį╬╗ĪŻ
ę“┤╦╬ęéāąĶę¬░čCAN─ŻēKįOų├×ķ│§╩╝╗»─Ż╩ĮŻ¼╚ńŽ┬Ż║
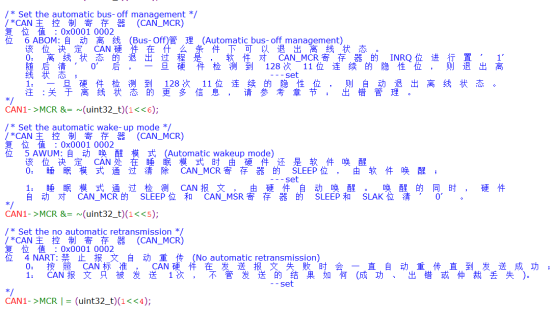
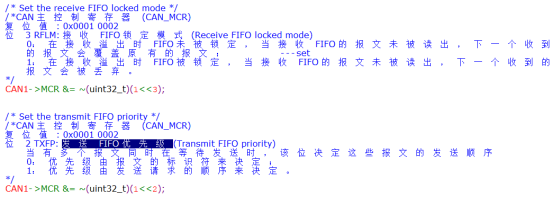
į┌│§╩╝╗»─Ż╩ĮįOų├│╔╣”ų«║¾Ż¼Ė∙ō■(j©┤)Š▀¾wæ¬ė├Ą─ę¬Ū¾Ż¼įOų├ūįäėļxŠĆ(Bus-Off)╣▄└ĒĪóūįäėåŠąč─Ż╩ĮĪó╩ŪʱĮ¹ų╣ł¾╬─ūįäėųžé„ĪóĮė╩šFIFOµiČ©─Ż╩ĮĪó░l(f©Ī)╦═ FIFO ā×(y©Łu)Ž╚╝ēĄ╚Ż¼╚ńŽ┬╩Š└²Ż║
CAN═©ą┼▀^│╠ųąŻ¼║▄ųžę¬Ą─ę╗³c╩ŪįOų├═©ą┼╦┘┬╩Ż¼bxCANĄ─═©ą┼╦┘┬╩įOų├ę└ō■(j©┤)HK32F103VET6ė├æ¶╩ųāįųąĄ─Ż║
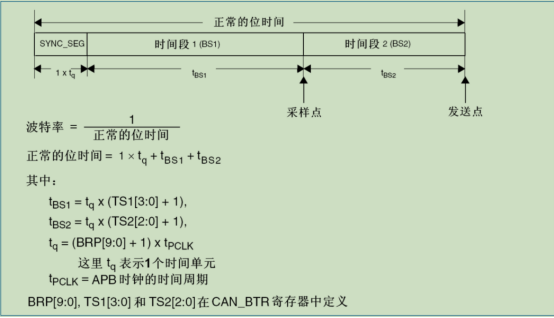
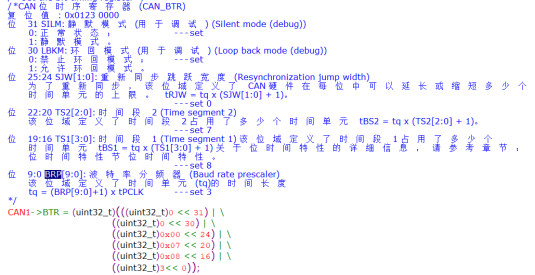
╬ęéā¼F(xi©żn)į┌ę¬įOų├500KbpsĄ─═©ą┼╦┘Č╚Ż¼─Ū├┤ąĶę¬įOų├APBĢrńŖŅl┬╩×ķ36MHzŻ¼▀ĆąĶę¬įOų├╬╗BRP=3Ż¼TS1=8Ż¼TS2=7Ż¼╚ńŽ┬Ż║
ų┴┤╦Ż¼CAN│§╩╝╗»ųąÄūéĆųžę¬╠žąįęčĮø(j©®ng)įOų├║├Ż¼┐╔ęį░čCAN─ŻēKįOų├╬╗š²│Ż─Ż╩ĮŻ¼ęį▒Ńš²│ŻĄž░l(f©Ī)╦═ł¾╬─ĪŻÅ─│§╩╝╗»─Ż╩ĮŪąōQ×ķš²│Ż─Ż╩ĮĄ─įOų├Ż¼╚ńŽ┬Ż║
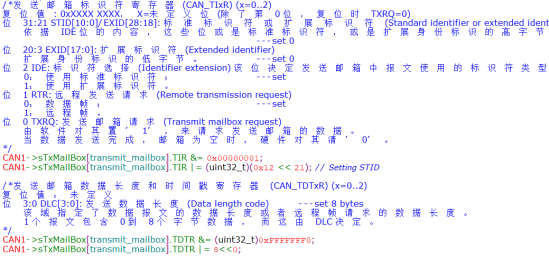
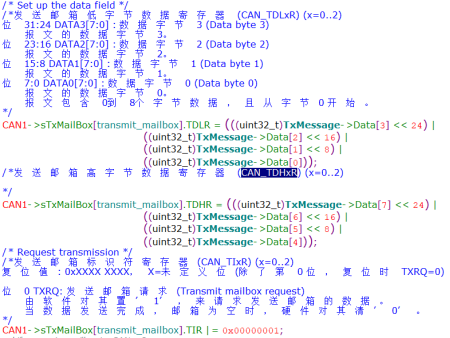
ł¾╬─Ą─░l(f©Ī)╦═Ż¼Ųõ║╦ą─į┌ė┌š²┤_▓┘ū„CAN_TIxRĪóCAN_TDTxRĪóCAN_TDLxRĪóCAN_TDHxR╝─┤µŲ„Ż¼╚ńŽ┬×ķ└²Ż¼░l(f©Ī)╦═ś╦£╩Ė±╩ĮĄ─ID=0x12Ą─8ūų╣Ø(ji©”)ķLČ╚Ą─CANöĄ(sh©┤)ō■(j©┤)ļł¾╬─ĪŻ
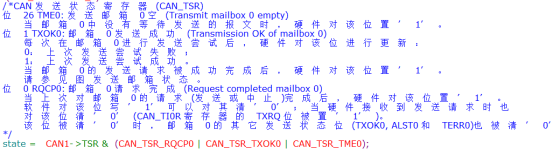
▓ó═©▀^ī”æ¬Ą─ĀŅæB(t©żi)╝─┤µŲ„Öz▓ķ░l(f©Ī)╦═│╔╣”┼cʱŻ║
─│éĆCAN╣Ø(ji©”)³cę¬Įė╩š──ą®CANł¾╬─Ż¼ė╔ŲõCANĮė╩šęÄ(gu©®)ätŻ©╗“š▀ĘQ×ķĮė╩š▀^×VŲ„Ż®įOČ©ĪŻį┌Įė╩šĄĮėąą¦Ą─ł¾╬─ų«Ū░Ż¼æ¬įōŽ╚įOų├║├ŲõĮė╩šęÄ(gu©®)ätĪŻ×ķ┤╦Ż¼HK32F103VET6Ą─bxCAN ┐žųŲŲ„×ķæ¬ė├│╠ą“╠ß╣®┴╦ 14 éĆ╬╗īÆ┐╔ūāĄ─Īó┐╔┼õų├Ą─▀^×VŲ„ĮMŻ©13~0Ż®Ż¼ęį▒Ńų╗Įė╩š─Ūą®▄ø╝■ąĶꬥ─ł¾╬─ĪŻė▓╝■▀^×VĄ─ū÷Ę©╣Ø(ji©”)╩Ī┴╦ CPU ķ_õNŻ¼Ę±ätŠ═▒žĒÜė╔▄ø╝■▀^×VÅ─Č°š╝ė├║▄┤¾Ą─ CPUķ_õNĪŻ├┐éĆ▀^×VŲ„ĮMxė╔2éĆ32╬╗╝─┤µŲ„Ż¼CAN_FiR1║═CAN_FiR2ĪŠ(CAN_FiRx) (iŻĮ0..13Ż╗ x=1..2)Ī┐Ż¼ĮM│╔ĪŻ
├┐éĆ▀^×VŲ„ĮMĄ─╬╗īÆČ╝┐╔ęį¬Ü┴ó┼õų├Ż¼ęįØMūŃæ¬ė├│╠ą“Ą─▓╗═¼ąĶŪ¾ĪŻĖ∙ō■(j©┤)╬╗īÆĄ─▓╗═¼Ż¼├┐éĆ▀^×VŲ„ĮM┐╔╠ß╣®Ż║
• 1 éĆ 32 ╬╗▀^×VŲ„Ż¼░³└©Ż║STDID[10:0]ĪóEXTID[17:0]ĪóIDE ║═ RTR ╬╗
• 2 éĆ 16 ╬╗▀^×VŲ„Ż¼░³└©Ż║STDID[10:0]ĪóIDEĪóRTR ║═ EXTID[17:15]╬╗
┤╦═Ō▀^×VŲ„┐╔┼õų├×ķŻ¼Ų┴▒╬╬╗─Ż╩Į║═ś╦ūRĘ¹┴ą▒Ē─Ż╩ĮĪŻ
į┌Ų┴▒╬╬╗─Ż╩ĮŽ┬Ż¼ś╦ūRĘ¹╝─┤µŲ„║═Ų┴▒╬╝─┤µŲ„ę╗ŲŻ¼ųĖČ©ł¾╬─ś╦ūRĘ¹Ą─╚╬║╬ę╗╬╗Ż¼æ¬įō░┤ššĪ░▒žĒÜŲź┼õĪ▒╗“Ī░▓╗ė├ĻPą─Ī▒╠Ä└ĒĪŻ
į┌ś╦ūRĘ¹┴ą▒Ē─Ż╩ĮŽ┬Ż¼Ų┴▒╬╝─┤µŲ„ę▓▒╗«öū„ś╦ūRĘ¹╝─┤µŲ„ė├ĪŻę“┤╦Ż¼▓╗╩Ū▓╔ė├ę╗éĆś╦ūRĘ¹╝ėę╗éĆŲ┴▒╬╬╗Ą─ĘĮ╩ĮŻ¼Č°╩Ū╩╣ė├ 2 éĆś╦ūRĘ¹╝─┤µŲ„ĪŻĮė╩šł¾╬─ś╦ūRĘ¹Ą─├┐ę╗╬╗Č╝▒žĒÜĖ·▀^×VŲ„ś╦ūRĘ¹ŽÓ═¼ĪŻ
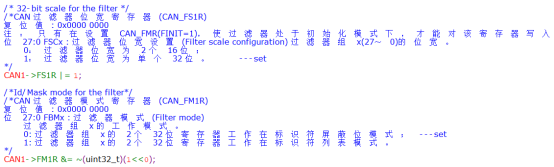
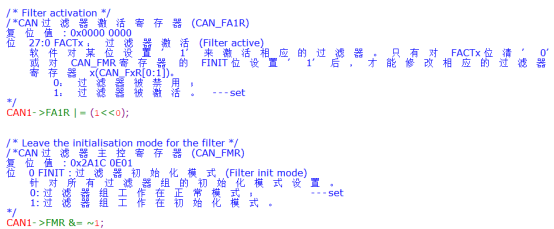
▀^×VŲ„ĮM┐╔ęį═©▀^ŽÓæ¬Ą─ CAN_FM1R ╝─┤µŲ„┼õų├ĪŻį┌┼õų├ę╗éĆ▀^×VŲ„ĮMŪ░Ż¼▒žĒÜ═©▀^ŪÕ│² CAN_FAR╝─┤µŲ„Ą─ FACT ╬╗Ż¼░č╦³įOų├×ķĮ¹ė├ĀŅæB(t©żi)ĪŻ═©▀^įOų├ CAN_FS1R Ą─ŽÓæ¬ FSCx ╬╗Ż¼┐╔ęį┼õų├ę╗éĆ▀^×VŲ„ĮMĄ─╬╗īÆŻ¼šłģóęŖŽ┬łDĪŻ═©▀^ CAN_FM1R Ą─ FBMx ╬╗Ż¼┐╔ęį┼õų├ī”æ¬Ą─Ų┴▒╬/ś╦ūRĘ¹╝─┤µŲ„Ą─ś╦ūRĘ¹┴ą▒Ē─Ż╩Į╗“Ų┴▒╬╬╗─Ż╩ĮĪŻ
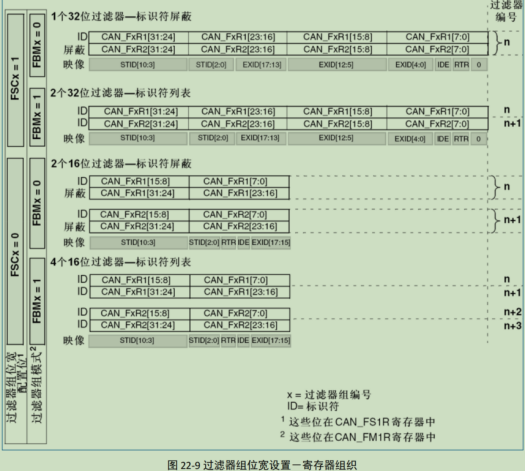
╬ęéāęį│Żė├Ą─ę╗éĆ32╬╗▀^×VŲ„+ś╦ūRĘ¹Ų┴▒╬Ą─ĘĮ╩Į×ķ└²▀Mąąšf├„ĪŻ

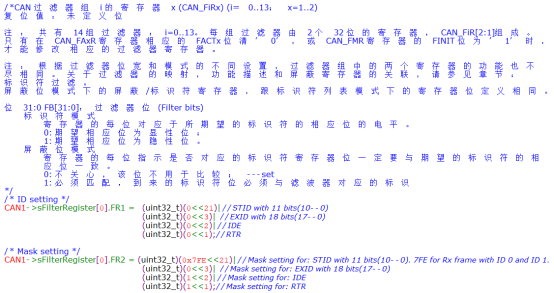
╚ń╔ŽłDŻ¼Ī░ė│Ž±Ī▒ąąųąŻ¼RTRī”æ¬CAN_FiRxĄ─bit1Ż¼IDEī”æ¬CAN_FiRxĄ─bit2Ż¼EXIDī”æ¬CAN_FiRxĄ─bit3-bit20Ż¼STIDī”æ¬CAN_FiRxĄ─bit21-bit31ĪŻĮY║ŽŪ░╬─ų┘▓├Č╬║═┐žųŲČ╬╦∙╩÷Ż¼RTR×ķ0Ģr▒Ē╩ŠįōCANļ╩ŪöĄ(sh©┤)ō■(j©┤)ļŻ¼×ķ1Ģr▒Ē╩ŠįōCANļ╩Ū▀h│╠ļŻ╗IDE×ķ0Ģr▒Ē╩ŠįōCANļ╩Ūś╦£╩Ė±╩ĮŻ¼×ķ1Ģr▒Ē╩ŠįōCANļ╩ŪöUš╣Ė±╩ĮĪŻś╦£╩Ė±╩ĮŽ┬ų╗ė├ĄĮSTID╬╗Ż¼öUš╣Ė±╩ĮŽ┬▀ĆĢ■ė├ĄĮEXID╬╗ĪŻį┌32╬╗▀^×VŲ„+ś╦ūRĘ¹Ų┴▒╬Ą─ĘĮ╩Įæ¬ė├ųąŻ¼Ī░IDĪ▒ąąųąŻ¼╝┤CAN_FiR1╝─┤µŲ„ė├ė┌įOų├CANł¾╬─Ą─IDĪóIDEĪóRTRĪŻĪ░Ų┴▒╬Ī▒ąąųąŻ¼╝┤CAN_FiR2╝─┤µŲ„ė├ė┌įOų├Įė╩šł¾╬─▀^│╠ųąŻ¼╩Ūʱ▒╚▌^IDĪóIDEĪóRTR▀@ą®ī”æ¬Ą─Ė„éĆ╬╗Ż¼×ķ0Ģr▒Ē╩ŠĪ░▓╗ė├ĻPą─Ī▒Ż¼×ķ1Ģr▒Ē╩ŠĪ░▒žĒÜŲź┼õĪ▒ĪŻęįRTR×ķ└²Ż¼«öįOų├CAN_FiR2Ą─RTR×ķ1Ī░▒žĒÜŲź┼õĪ▒Ż¼ŪęCAN_FiR1ĢrRTR×ķ0ĢrŻ¼▒Ē╩Šų╗Įė╩šöĄ(sh©┤)ō■(j©┤)ļŻ¼▓╗Įė╩š▀h│╠ļŻ╗Č°«öįOų├CAN_FiR2Ą─RTR×ķ0ĢrĪ░▓╗ė├ĻPą─Ī▒Ż¼▒Ē╩Š¤ošō╩ŪöĄ(sh©┤)ō■(j©┤)ļ▀Ć╩Ū▀h│╠ļŻ¼Č╝Ģ■▀MąąĮė╩šĪŻ
Ž┬├µŻ¼╬ęéāķ_╩╝šf├„▀^×VŲ„Ą─Š▀¾wįOų├ĪŻ
╩ūŽ╚æ¬įōįOų├▀^×VŲ„ĮM╣żū„į┌│§╩╝╗»─Ż╩Į▓óĢ║ĢrĮ¹ė├▀^×VŲ„Ż¼╚ńŽ┬Ż║
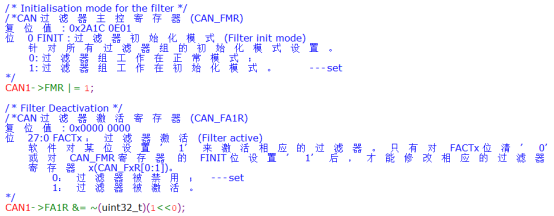
Įėų°įOų├▀^×VŲ„Ą─╬╗īÆ╩Ūå╬éĆ32╬╗Ż¼╝░╣żū„į┌ś╦ūRĘ¹Ų┴▒╬╬╗─Ż╩ĮŽ┬Ż¼╚ńŽ┬Ż║
╝┘įO╬ęéā¼F(xi©żn)į┌ų╗ąĶę¬Įė╩šā╔ŚlCANś╦£╩öĄ(sh©┤)ō■(j©┤)ļŻ¼ŪęŲõIDĘųäe×ķ00000000000║═00000000001Ż¼─Ū├┤æ¬įōįOų├IDE×ķ0Ż¼RTR×ķ0Ż¼CAN_FiR1×ķ0Ż¼CAN_FiR2×ķ0xFFC00006Ż¼╚ńŽ┬Ż║
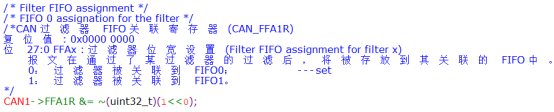
Įėų°įOų├Įė╩šĄĮĄ─ł¾╬─┤µĘ┼ė┌──éĆFIFOŻ¼▀@└’╬ęéā┤µĘ┼ĄĮFIFO 0Ż¼╚ńŽ┬Ż║
ūŅ║¾ųžą┬╝ż╗Ņ▀^×VŲ„║═įOų├▀^×VŲ„╣żū„į┌š²│Ż─Ż╩ĮŻ║

ŠÄ▌ŗŻ║zzy ūŅ║¾ą▐Ė─ĢrķgŻ║2022-04-15

ŽĄ┐═Ę■")
ŽĄ┐═Ę■")
ŽĄ┐═Ę■")
ŽĄ┐═Ę■")
