





����MM32SPIN늙C/�Դ����оƬ����ˢ늙C�ӑ��÷��������C���˶�C
���ĺ��ν�B����MM32SPIN늙C/�Դ����оƬ��ˢ�Ӽ��g��"��C܉�E����"�đ��Ì�����������ɫ:
ARM Cortex-M0������늙C�ӌ���оƬ
�Ƚ��ɽMN��Gate Driver
�ٶ�����ݔ��ɞ�ģ�M늉���PWM��̖
ADC �ɘ�λ�û���

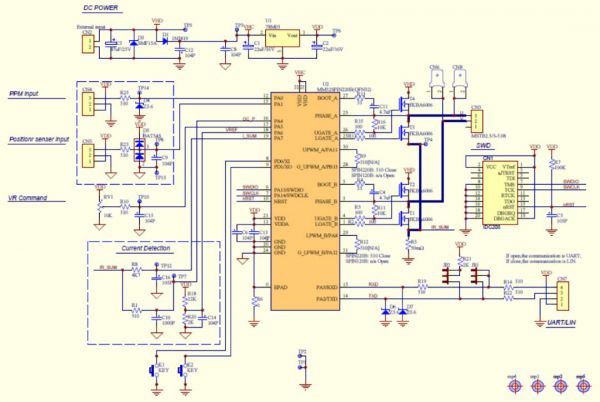
�Dһ����Ҋ��7.5V/10W ��ˢ��C
2����ˢ��C���gԭ��
�ڴ˽�B��ˢ��C܉�E�Ƅӌ��F(xi��n)����.
��ˢ��C�Ȳ��֞�����^(q��)�K
���ư�
��ˢ�R�_
λ�û��ڂ�����

�D������ˢ�R�_�c���ư�

�D��������λ�Â�����
���x:
LSB : 12 bits ADC �ɘӆ�λ
a �����ٶȆ�λ�� (LSB��(ms^2))
t ���r�g���(ms)
SP : �ٶȆ�λ��(LSB��ms)
P1���Y��λ�Æ�λ��LSB
P0 ����ʼλ�Æ�λ��LSB
T1 ���Y���r�g���ms(����)
T0 ����ʼ�r�g��λ��ms(����)
V1 ��(P1-P0) ��(T1-T0) ��λ:��(LSB��ms)
V0 : ��ʼ�ٶȆ�λ�� (LSB��ms)
X �����x��λ:��(LSB)
Th ��(T1-T0)��2���(ms)
V2 : �ٶ�܉�E����ن�λ��(LSB��ms)
��ˢ�ٶ��c܉�E�Pϵ
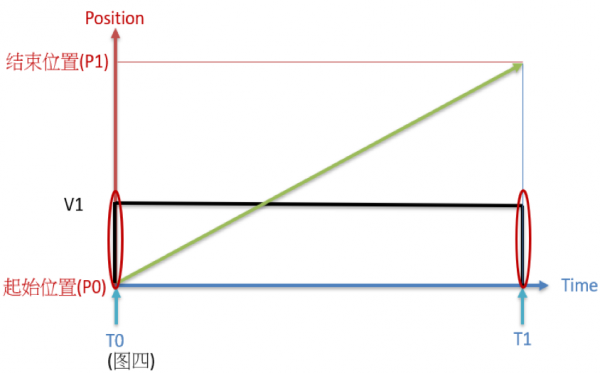
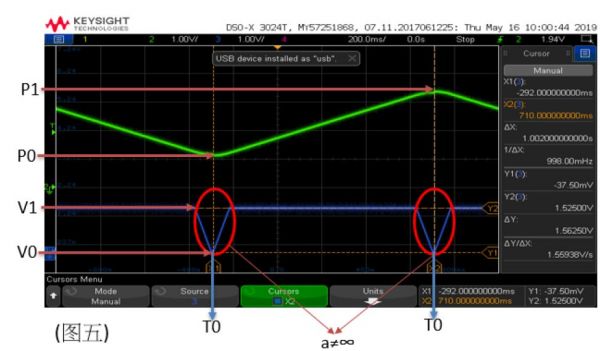
�D�� ���������܉�E�\��(�tɫȦ��ʾa = ��)
V1����ٶ�
�˕r���Լtɫ���ٶ��\�ӕr�g�����Ϟ���
�Gɫ��λ��܉�E
�����ȼ��ٶ��\�ӹ�ʽ:
V = V0 +(a*t ) ;(��ʽһ)
x = V0t +((a*t*t)��2);(��ʽ��)
�����ٞ���tV0 �ɺ���
�҂����ԏļ��ٶ��\��(��ʽһ) (��ʽ��) ��֪늙C�ij��ٵ�����,��Ҫ���M�r�g�c���x
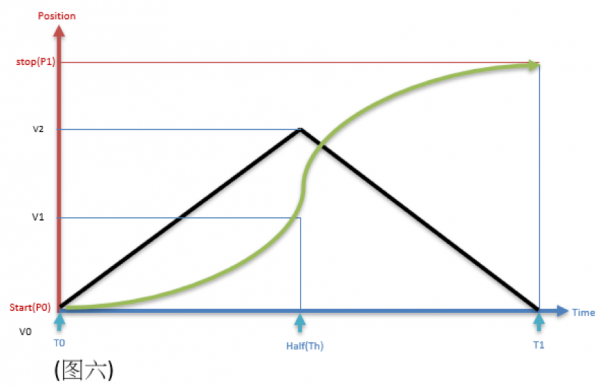
�D�壺������܉�E�\��
�迼�]���w������oֹ���Ƅӡ��oֹ�^����Ҫ���^���ٶ��\��
CH2 �Gɫ:λ��܉�E(0~5) Voltage������(0~4095) LSB
CH3 �{ɫ:�ٶ�܉�E(0~5) Voltage������(0~4095) V
�������ٶ�܉�E�\��
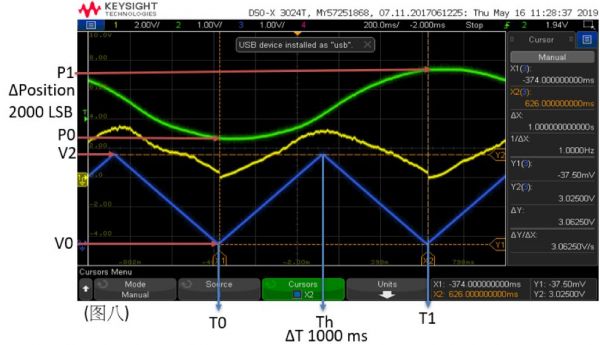
��D6
V2 = (P1-P0)��(Th-T0);
V2 = 2*V1; ���O:늙C�ٶȿ��_��(2*V1)
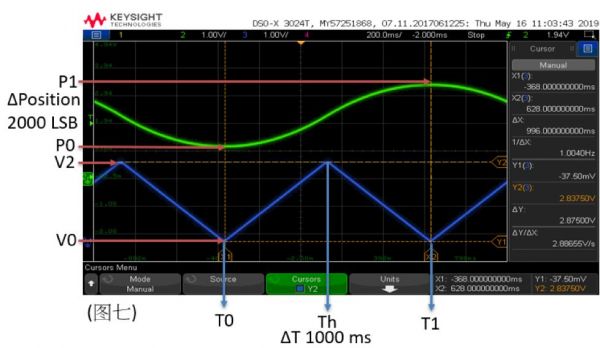
�D�ߣ� ���H܉�E�\�ӕr�g
CH2 �Gɫ:λ��܉�E(0~5) Voltage������(0~4095) LSBCH3 �{ɫ:�ٶ�܉�E(0~5) Voltage������(0~4095) V
�D�ˣ�늙C���H�\�D
CH1 �Sɫ:PWMռ�ձ�(0~5)Voltage,������( 0~100)% duty cycle
CH2 �Gɫ:λ��܉�E(0~5) Voltage������(0~4095) LSB
CH3 �{ɫ:�ٶ�܉�E(0~5) Voltage������(0~4095) V
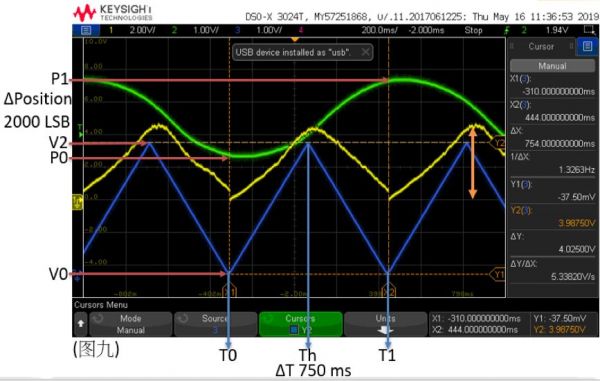
�D�ţ�늙C���H�\�D
CH1 �Sɫ:PWMռ�ձ�(0~5)Voltage,������( 0~100)% duty cycle
CH2 �Gɫ:λ��܉�E(0~5) Voltage������(0~4095) LSB
CH3 �{ɫ:�ٶ�܉�E(0~5) Voltage������(0~4095) V
�ĈD���c�D���@ʾ�����xԽ�̻��Ǖr�gԽ����r���ٶ�܉�E�S֮����
V(�ٶ�) ��PWM ռ�ձ�,���ٶ��^�߄tռ�ձȕ��ʬF(xi��n)Full duty ��B(t��i)(��D����ɫ���^����ʾռ�ձ��ѽӽ��M�d)
�����ٶ�܉�E�\��
���ε��ٶ�܉�E��Ҫ�Ǹ���
��ֹ�ٶ��^�ߓp��늙C
늙C�������������
�����ٶ�܉�E���ھ����c������܉�E�\��
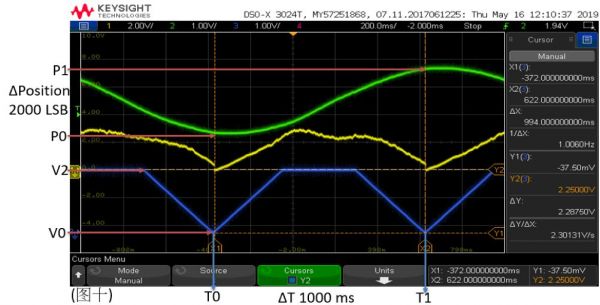
�Dʮ��늙C���H�\�D
CH1 �Sɫ:PWMռ�ձ�(0~5)Voltage,������( 0~100)% duty cycle
CH2 �Gɫ:λ��܉�E(0~5) Voltage������(0~4095) LSB
CH3 �{ɫ:�ٶ�܉�E(0~5) Voltage������(0~4095) V
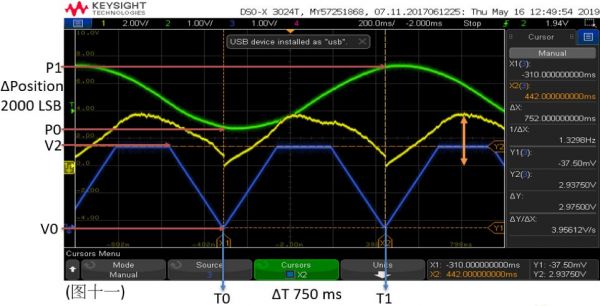
�Dʮһ��늙C���H�\�D
CH1 �Sɫ:PWMռ�ձ�(0~5)Voltage,������( 0~100)% duty cycle
CH2 �Gɫ:λ��܉�E(0~5) Voltage������(0~4095) LSB
CH3 �{ɫ:�ٶ�܉�E(0~5) Voltage������(0~4095) V
�ĈD���c�Dʮһ�������@���������ٶ�܉�E���������ٶ�܉�Eռ�ձ����½�,��б������
�������ٶ�܉�E
�����ٶ�܉�E
���ٶ�(a)
С
��
����� (V2)
��
С
�������ٶ�܉�E�c�����ٶ�܉�Eԓ����x��,ȡ�Q��늙C��������,�������{��܉�E�O��
3��Ӳ���OӋ
4���YՓ
MM32SPIN늙C/�Դ����оƬ,���ЃȽ�����Gate Driver,�ஔ�m����ˢ늙C����,�����غ�����늙C�Ӱ���OӋ,�Ƚ����������ɿ��ٷ���܉�E�����㷨,�����ܛ��Ч��,ͬ�r�����_�l(f��)�ɱ����͵ĺ�̎������Ҫ�˽�����`��MCU�aƷ��Ո(li��n)ϵ�`�����Ĵ�����-�f���¿Ƽ�

����ls ����ĕr�g��2022-06-13

ϵ�ͷ�")
ϵ�ͷ�")
ϵ�ͷ�")
ϵ�ͷ�")
