─·║├Ż¼ÜgėŁ▀M╚ļ╔Ņ█┌╩ąĘf╠žą┬┐Ų╝╝ėąŽ▐╣½╦Š╣┘ĘĮŠW(w©Żng)šŠŻĪ
─·║├Ż¼ÜgėŁ▀M╚ļ╔Ņ█┌╩ąĘf╠žą┬┐Ų╝╝ėąŽ▐╣½╦Š╣┘ĘĮŠW(w©Żng)šŠŻĪ
/**************************************************************************//** * @file main.c * @version V3.00 * $Revision: 3 $ * $Date: 15/09/02 10:03a $ * @brief Demonstrate how to set GPIO pin mode and use pin data input/output control. č▌╩Š╚ń║╬įOų├GPIOę²─_─Ż╩Į▓ó╩╣ė├ę²─_öĄ(sh©┤)ō■(j©┤)▌ö╚ļ/▌ö│÷┐žųŲĪŻ * @note * Copyright (C) 2013~2015 Nuvoton Technology Corp. All rights reserved. * ******************************************************************************/ #include "stdio.h" #include "M451Series.h" #include "NuEdu-Basic01.h" #define PLL_CLOCK 72000000 void SYS_Init(void) { /*---------------------------------------------------------------------------------------------------------*/ /* Init System Clock */ /*---------------------------------------------------------------------------------------------------------*/ /* Enable HIRC clock (Internal RC 22.1184MHz) */ CLK_EnableXtalRC(CLK_PWRCTL_HIRCEN_Msk); /* Wait for HIRC clock ready */ CLK_WaitClockReady(CLK_STATUS_HIRCSTB_Msk); /* Select HCLK clock source as HIRC and and HCLK clock divider as 1 */ CLK_SetHCLK(CLK_CLKSEL0_HCLKSEL_HIRC, CLK_CLKDIV0_HCLK(1)); /* Enable HXT clock (external XTAL 12MHz) */ CLK_EnableXtalRC(CLK_PWRCTL_HXTEN_Msk); /* Wait for HXT clock ready */ CLK_WaitClockReady(CLK_STATUS_HXTSTB_Msk); /* Set core clock as PLL_CLOCK from PLL */ CLK_SetCoreClock(PLL_CLOCK); /* Enable UART module clock */ CLK_EnableModuleClock(UART0_MODULE); /* Select UART module clock source as HXT and UART module clock divider as 1 */ CLK_SetModuleClock(UART0_MODULE, CLK_CLKSEL1_UARTSEL_HXT, CLK_CLKDIV0_UART(1)); /*---------------------------------------------------------------------------------------------------------*/ /* Init I/O Multi-function */ /*---------------------------------------------------------------------------------------------------------*/ /* Set PD multi-function pins for UART0 RXD(PD.6) and TXD(PD.1) */ SYS->GPD_MFPL &= ~(SYS_GPD_MFPL_PD6MFP_Msk | SYS_GPD_MFPL_PD1MFP_Msk); SYS->GPD_MFPL |= (SYS_GPD_MFPL_PD6MFP_UART0_RXD | SYS_GPD_MFPL_PD1MFP_UART0_TXD); } void UART0_Init() { /*---------------------------------------------------------------------------------------------------------*/ /* Init UART */ /*---------------------------------------------------------------------------------------------------------*/ /* Reset UART module */ SYS_ResetModule(UART0_RST); /* Configure UART0 and set UART0 baud rate */ UART_Open(UART0, 115200); } /*---------------------------------------------------------------------------------------------------------*/ /* Main Function */ /*---------------------------------------------------------------------------------------------------------*/ int32_t main(void) { int i, j; /* Unlock protected registers */ SYS_UnlockReg(); /* Init System, peripheral clock and multi-function I/O */ SYS_Init(); /* Lock protected registers */ SYS_LockReg(); /* Init UART0 for printf */ UART0_Init(); printf("\n\nCPU @ %dHz\n", SystemCoreClock); printf("LED test\n\r"); Initial_LED(); while(1) { for(i = 0; i < 9; i++) { Write_LED_Bar(i); for(j = 0; j < 600; j++) CLK_SysTickDelay(1000); } ėą▒žę¬šfšfLED,š²╦∙ų^├┐ę╗éĆ│╠ą“äéķ_╩╝Č╝ę¬īæĪ░HELLO WORLDĪ▒,Č°å╬Ų¼ÖC╗“ŪČ╚ļ╩ĮČ╝ę¬³c┴┴ąĪ¤¶Ż¼╚f╬’Å─³c¤¶ķ_╩╝Ż¼╣■╣■ ╦³Ą─ĮY(ji©”)śŗ(g©░u)║▄║åå╬
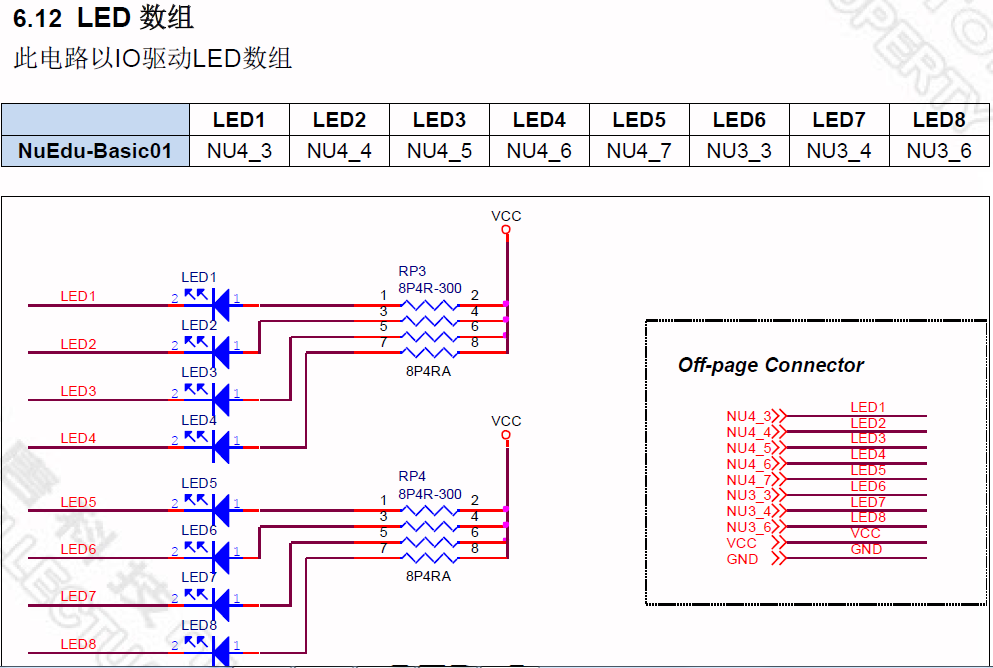
LEDŻ¼╩Ūę╗ĘN─▄ē“?q©▒)óļŖ─▄▐D(zhu©Żn)╗»×ķ┐╔ęŖ╣ŌĄ─╣╠æB(t©żi)Ą─░ļī¦¾wŲ„╝■Ż¼╝┤░l(f©Ī)╣ŌČ■śO╣▄Ż¼╦³┐╔ęįų▒Įė░čļŖ▐D(zhu©Żn)╗»×ķ╣ŌĪŻLEDĄ─ą─┼K╩Ūę╗éĆ░ļī¦¾wĄ─Š¦Ų¼Ż¼Š¦Ų¼Ą─ę╗Č╦ĖĮį┌ę╗éĆų¦╝▄╔ŽŻ¼ę╗Č╦╩ŪžōśOŻ¼ ┴Ēę╗Č╦▀BĮėļŖį┤Ą─š²śOŻ¼╩╣š¹éĆŠ¦Ų¼▒╗Łh(hu©ón)觜õų¼ĘŌčbŲüĒĪŻ░ļī¦¾wŠ¦Ų¼ė╔ā╔▓┐ĘųĮM│╔Ż¼ę╗▓┐Ęų╩ŪPą═░ļī¦¾wŻ¼į┌╦³└’├µ┐šč©š╝ų„ī¦Ąž╬╗Ż¼┴Ēę╗Č╦╩ŪNą═░ļī¦¾wŻ¼į┌▀@▀ģų„ę¬╩ŪļŖūėĪŻ ▀@ā╔ĘN░ļī¦¾w▀BĮėŲüĒĄ─Ģr║“Ż¼╦³éāų«ķgŠ═ą╬│╔ę╗éĆP-NĮY(ji©”)ĪŻ«öļŖ┴„═©▀^ī¦ŠĆū„ė├ė┌▀@éĆŠ¦Ų¼Ą─Ģr║“Ż¼ļŖūėŠ═Ģ■▒╗═ŲŽ“Pģ^(q©▒)Ż¼į┌Pģ^(q©▒)└’ļŖūėĖ·┐šč©Å═║ŽŻ¼╚╗║¾Š═Ģ■ęį╣ŌūėĄ─ą╬╩Į░l(f©Ī)│÷─▄┴┐Ż¼ ▀@Š═╩ŪLED¤¶░l(f©Ī)╣ŌĄ─įŁ└ĒĪŻČ°╣ŌĄ─▓©ķLę▓Š═╩Ū╣ŌĄ─Ņü╔½Ż¼╩Ūė╔ą╬│╔P-NĮY(ji©”)Ą─▓─┴ŽøQČ©Ą─ĪŻ å╬éĆĄ─LED¤¶ųķų╗─▄į┌Ą═ļŖē║Ż©╝s3VŻ®ĪóĄ═ļŖ┴„Ż©╝sÄū║┴░▓Ż®Ž┬╣żū„Ż¼░l(f©Ī)│÷Ą─╣ŌŠĆ║▄╬ó╚§ĪŻąĶę¬īóįSČÓLED¤¶ųķ┤«┬ō(li©ón)╗“▓ó┬ō(li©ón)ŲüĒŻ╗ ═¼Ģrå╬éĆLED¤¶ųķ╩Ūå╬Ž“?q©▒)¦ļŖĄ─Ż¼×ķ┴╦│õĘų└¹ė├Į╗┴„ļŖĄ─š²žō░ļų▄ļŖ┴„Ż¼▀@Š═ąĶę¬ę╗ēK╝»│╔ļŖ┬ĘąŠŲ¼Ż¼īóĮ╗┴„220VļŖį┤▐D(zhu©Żn)ūā?y©Łu)ķļŖē║ĪóļŖ┴„─▄┼cLED╝»║ŽŽÓŲź┼õĄ─ų▒┴„ļŖŻ¼ ęįØMūŃLED¤¶ųķ╝»║Ž¾wĄ─ę¬Ū¾Ż¼╩╣Ųõ─▄š²│Ż░l(f©Ī)╣ŌĪŻ Ž┬łD╩Ū
MCU ═Ōć·▀BĮė
ļŖ┬ĘłD─·├„░ū┴╦├┤Ż┐į┘┐┤▄ø╝■Ą─ŽÓæ¬Ą─Äņ╬─╝■
/* Peripheral and SRAM base address */ #define SRAM_BASE (0x20000000UL) /*!< (SRAM ) Base Address */ #define PERIPH_BASE (0x40000000UL) /*!< (Peripheral) Base Address */
#define AHBPERIPH_BASE PERIPH_BASE #define APBPERIPH_BASE (PERIPH_BASE + 0x00040000)
#define GCR_BASE (AHBPERIPH_BASE + 0x00000) #define CLK_BASE (AHBPERIPH_BASE + 0x00200) #define INT_BASE (AHBPERIPH_BASE + 0x00300) #define GPIO_BASE (AHBPERIPH_BASE + 0x04000) #define GPIOA_BASE (AHBPERIPH_BASE + 0x04000) #define GPIOB_BASE (AHBPERIPH_BASE + 0x04040) #define GPIOC_BASE (AHBPERIPH_BASE + 0x04080) #define GPIOD_BASE (AHBPERIPH_BASE + 0x040C0) #define GPIOE_BASE (AHBPERIPH_BASE + 0x04100) #define GPIOF_BASE (AHBPERIPH_BASE + 0x04140) #define GPIO_DBCTL_BASE (AHBPERIPH_BASE + 0x04440) #define GPIO_PIN_DATA_BASE (AHBPERIPH_BASE + 0x04800) #define PDMA_BASE (AHBPERIPH_BASE + 0x08000) #define USBH_BASE (AHBPERIPH_BASE + 0x09000) #define FMC_BASE (AHBPERIPH_BASE + 0x0C000) #define EBI_BASE (AHBPERIPH_BASE + 0x10000) #define CRC_BASE (AHBPERIPH_BASE + 0x31000)
#define SYS ((SYS_T *) GCR_BASE) #define SYSINT ((SYS_INT_T *) INT_BASE) #define CLK ((CLK_T *) CLK_BASE) #define PA ((GPIO_T *) GPIOA_BASE) #define PB ((GPIO_T *) GPIOB_BASE) #define PC ((GPIO_T *) GPIOC_BASE) #define PD ((GPIO_T *) GPIOD_BASE) #define PE ((GPIO_T *) GPIOE_BASE) #define PF ((GPIO_T *) GPIOF_BASE) #define GPIO ((GPIO_DBCTL_T *) GPIO_DBCTL_BASE) #define PDMA ((PDMA_T *) PDMA_BASE) #define USBH ((USBH_T *) USBH_BASE) #define FMC ((FMC_T *) FMC_BASE) #define EBI ((EBI_T *) EBI_BASE) #define CRC ((CRC_T *) CRC_BASE) #define GPIO_MODE_INPUT 0x0UL /*!< Input Mode */ #define GPIO_MODE_OUTPUT 0x1UL /*!< Output Mode */ #define GPIO_MODE_OPEN_DRAIN 0x2UL /*!< Open-Drain Mode */ #define GPIO_MODE_QUASI 0x3UL /*!< Quasi-bidirectional Mode */ /* One Bit Mask Definitions */ #define BIT0 0x00000001 #define BIT1 0x00000002 #define BIT2 0x00000004 #define BIT3 0x00000008 #define BIT4 0x00000010 #define BIT5 0x00000020 #define BIT6 0x00000040 #define BIT7 0x00000080 #define BIT8 0x00000100 #define BIT9 0x00000200 #define BIT10 0x00000400 #define BIT11 0x00000800 #define BIT12 0x00001000 #define BIT13 0x00002000 #define BIT14 0x00004000 #define BIT15 0x00008000 #define BIT16 0x00010000 #define BIT17 0x00020000 #define BIT18 0x00040000 #define BIT19 0x00080000 #define BIT20 0x00100000 #define BIT21 0x00200000 #define BIT22 0x00400000 #define BIT23 0x00800000 #define BIT24 0x01000000 #define BIT25 0x02000000 #define BIT26 0x04000000 #define BIT27 0x08000000 #define BIT28 0x10000000 #define BIT29 0x20000000 #define BIT30 0x40000000 #define BIT31 0x80000000 void GPIO_SetMode(GPIO_T *port, uint32_t u32PinMask, uint32_t u32Mode) { uint32_t i; for(i = 0; i < GPIO_PIN_MAX; i++) { if(u32PinMask & (1 << i)) { port->MODE = (port->MODE & ~(0x3 << (i << 1))) | (u32Mode << (i << 1)); } } } void Initial_LED(void) { GPIO_SetMode(PB, BIT2, GPIO_MODE_OUTPUT); //LED1 GPIO_SetMode(PB, BIT3, GPIO_MODE_OUTPUT); //LED2 GPIO_SetMode(PC, BIT3, GPIO_MODE_OUTPUT); //LED3 GPIO_SetMode(PC, BIT2, GPIO_MODE_OUTPUT); //LED4 GPIO_SetMode(PA, BIT9, GPIO_MODE_OUTPUT); //LED5 GPIO_SetMode(PB, BIT1, GPIO_MODE_OUTPUT); //LED6 GPIO_SetMode(PC, BIT7, GPIO_MODE_OUTPUT); //LED7 }
ĻPė┌AHB┼cAPBį┌╬ęĄ─ā╚(n©©i)║╦╝▄śŗ(g©░u)ę╗╬─ųąėą├Ķ╩÷Ż¼į┘┤╦▓╗╝ėšf├„ĪŻ
─Ń░č▀@Äū▓┐ĘųĘ┼ĄĮę╗éĆ│╠ą“ųą═Ļ╚½┐╔ęį▀\ąą
I/O╣▄─_Ą─IĀŅæB(t©żi)┐╔ė╔▄ø╝■¬Ü┴óĄž┼õų├×ķ▌ö╚ļŻ¼═Ų═ņ╩ĮĄ─▌ö│÷Ż¼ķ_┬®╗“£╩ļpŽ“─Ż╩ĮĪŻÅ═╬╗ų«║¾Ż¼╦∙ėą╣▄─_Ą──Ż╩Į╚ĪøQė┌CIOIN (CONFIG0[10])Ą─įOų├ĪŻ
├┐éĆI/O╣▄─_ėąę╗éĆūĶųĄ×ķ110K~300KĄ─╚§╔Ž└ŁļŖūĶĮėĄĮVDD ╔ŽŻ¼VDDĘČć·Å─5.0 V ĄĮ2.5 VĪŻ
╩ūŽ╚╬ęéāüĒ┐┤╔Ž└ŁļŖūĶ┼cŽ┬└ŁļŖūĶŻ║
ā╔š▀╣▓═¼Ą─ū„ė├╩ŪŻ║▒▄├ŌļŖē║Ą─Ī░æęĖĪĪ▒Ż¼įņ│╔ļŖ┬ĘĄ─▓╗ĘĆ(w©¦n)Č©Ż╗
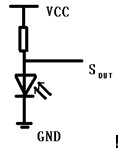
ę╗Īó╔Ž└ŁļŖūĶ╚ńłD╦∙╩Š
1ĪóĖ┼─ŅŻ║īóę╗éĆ▓╗┤_Č©Ą─ą┼╠¢Ż¼═©▀^ę╗éĆļŖūĶ┼cļŖį┤VCCŽÓ▀BŻ¼╣╠Č©į┌Ė▀ļŖŲĮŻ╗2Īó╔Ž└Ł╩Ūī”Ų„╝■ūó╚ļļŖ┴„Ż╗╣ÓļŖ┴„Ż╗3Īó«öę╗éĆĮėėą╔Ž└ŁļŖūĶĄ─IOČ╦┐┌įOų├×ķ▌ö╚ļĀŅæB(t©żi)ĢrŻ¼╦³Ą─│ŻæB(t©żi)×ķĖ▀ļŖŲĮŻ╗
Č■ĪóŽ┬└ŁļŖūĶ╚ńłD╦∙╩ŠŻ║
1Īó Ė┼─ŅŻ║īóę╗éĆ▓╗┤_Č©Ą─ą┼╠¢Ż¼═©▀^ę╗éĆļŖūĶ┼cĄžGNDŽÓ▀BŻ¼╣╠Č©į┌Ą═ļŖŲĮŻ╗
2ĪóŽ┬└Ł╩ŪÅ─Ų„╝■▌ö│÷ļŖ┴„Ż╗└ŁļŖ┴„Ż╗3Īó«öę╗éĆĮėėąŽ┬└ŁļŖūĶĄ─IOČ╦┐┌įOų├×ķ▌ö╚ļĀŅæB(t©żi)ĢrŻ¼╦³Ą─│ŻæB(t©żi)×ķĄ═ļŖŲĮŻ╗
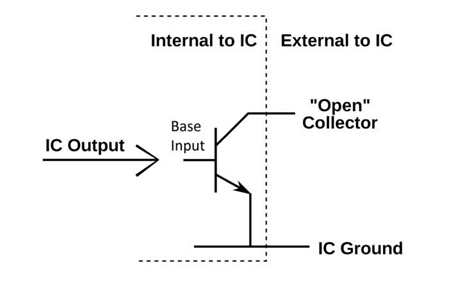
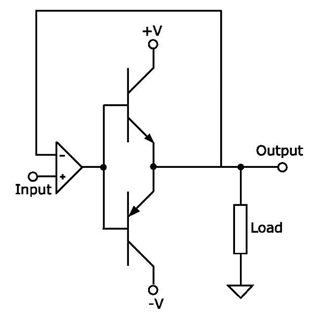
ę¬└ĒĮŌ═Ų═ņ▌ö│÷Ż¼╩ūŽ╚ę¬└ĒĮŌ║├╚²śO╣▄Ż©Š¦¾w╣▄Ż®Ą─įŁ└ĒĪŻŽ┬├µ▀@ĘN╚²śO╣▄ėą╚²éĆČ╦┐┌Ż¼Ęųäe╩Ū╗∙śOŻ©BaseŻ®Īó╝»ļŖśOŻ©CollectorŻ®║═░l(f©Ī)╔õśOŻ©EmitterŻ®ĪŻ
Ž┬łD╩ŪNPNą═Š¦¾w╣▄ĪŻ
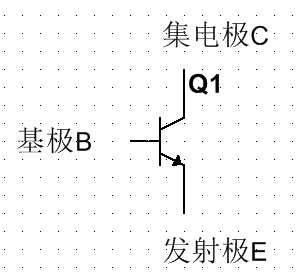
▀@ĘN╚²śO╣▄╩ŪļŖ┴„┐žųŲą═į¬Ų„╝■Ż¼ūóęŌĻPµIį~ļŖ┴„┐žųŲĪŻęŌ╦╝Š═╩ŪšfŻ¼ų╗ę¬╗∙śOBėą▌ö╚ļŻ©╗“▌ö│÷Ż®ļŖ┴„Š═┐╔ęįī”▀@éĆŠ¦¾w╣▄▀Mąą┐žųŲ┴╦ĪŻ
Ž┬├µšłį╩įS╬ęōQę╗Ž┬Ė┼─ŅŻ¼░č╗∙śOBęĢ×ķ┐žųŲČ╦Ż¼╝»ļŖśOCęĢ×ķ▌ö╚ļČ╦Ż¼░l(f©Ī)╔õśOEęĢ×ķ▌ö│÷Č╦ĪŻ▀@└’▌ö╚ļ▌ö│÷╩ŪųĖļŖ┴„┴„äėĄ─ĘĮŽ“ĪŻ
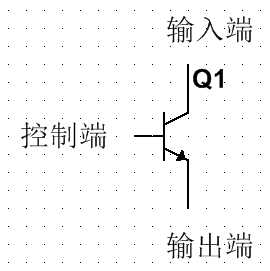
Č°PNP╣▄š²║├ŽÓĘ┤Ż¼«öėąļŖ┴„Å─┐žųŲČ╦┴„│÷ĢrŻ¼Š═Ģ■ėąļŖ┴„Å─▌ö╚ļČ╦┴„ĄĮ▌ö│÷Č╦ĪŻ

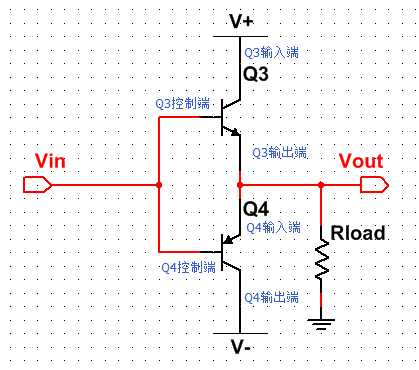
╔Ž├µĄ─╚²śO╣▄╩ŪNą═╚²śO╣▄Ż¼Ž┬├µĄ─╚²śO╣▄╩ŪPą═╚²śO╣▄Ż¼šł┴¶ęŌ┐žųŲČ╦Īó▌ö╚ļČ╦║═▌ö│÷Č╦ĪŻ
«öVinļŖē║×ķV+ĢrŻ¼╔Ž├µĄ─Ną═╚²śO╣▄┐žųŲČ╦ėąļŖ┴„▌ö╚ļŻ¼Q3ī¦═©Ż¼ė┌╩ŪļŖ┴„Å─╔Ž═∙Ž┬═©▀^Ż¼╠ß╣®ļŖ┴„Įožō▌dĪŻ
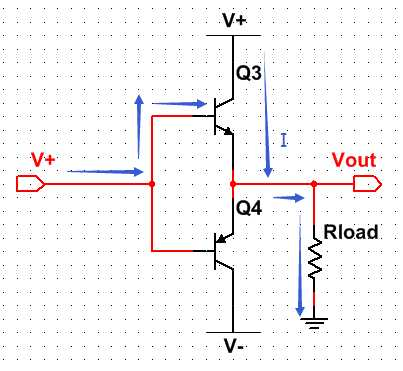
Įø(j©®ng)▀^╔Ž├µĄ─Ną═╚²śO╣▄╠ß╣®ļŖ┴„Įožō▌dŻ©RloadŻ®Ż¼▀@Š═ĮąĪĖ═ŲĪ╣
«öVinļŖē║×ķV-ĢrŻ¼Ž┬├µĄ─╚²śO╣▄ėąļŖ┴„┴„│÷Ż¼Q4ī¦═©Ż¼ėąļŖ┴„Å─╔Ž═∙Ž┬┴„▀^ĪŻ
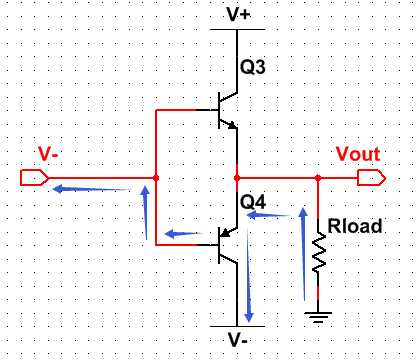
Įø(j©®ng)▀^Ž┬├µĄ─Pą═╚²śO╣▄╠ß╣®ļŖ┴„Įožō▌dŻ©RloadŻ®Ż¼▀@Š═ĮąĪĖ═ņĪ╣ĪŻ
ęį╔ŽŻ¼▀@Š═╩Ū═Ų═ņŻ©push-pullŻ®ļŖ┬ĘĪŻ




─Ū├┤╩▓├┤╩Ūķ_┬®─žŻ┐▀@éĆį┌╬ę┤░Ėę╗ķ_Ņ^Įo│÷Ą─ĪĖŠW(w©Żng)╔Ž┘Y┴ŽĪ╣└’ųvĄ├║▄įö╝Ü┴╦Ż¼╬ę▀@└’ę▓║åå╬īæę╗Ž┬ĪŻ
ę¬└ĒĮŌķ_┬®Ż¼┐╔ęįŽ╚└ĒĮŌķ_╝»ĪŻ
╚ńłDŻ¼ķ_╝»Ą─ęŌ╦╝Ż¼Š═╩Ū╝»ļŖśOCę╗Č╦╩▓├┤Č╝▓╗ĮėŻ¼ų▒Įėū„×ķ▌ö│÷Č╦┐┌ĪŻ
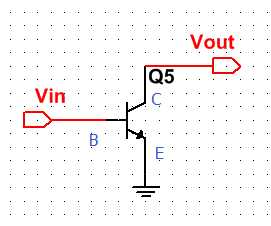
╚ń╣¹ę¬ė├▀@ĘNļŖ┬ĘĦę╗éĆžō▌dŻ¼▒╚╚ńę╗éĆLEDŻ¼▒žĒÜĮėę╗éĆ╔Ž└ŁļŖūĶŻ¼Š═Ž±▀@śėĪŻ

«öVinø]ėąļŖ┴„Ż¼Q5öÓķ_ĢrŻ¼LED┴┴ĪŻ «öVin┴„╚ļļŖ┴„Ż¼Q5ī¦═©ĢrŻ¼LED£ńĪŻ
ķ_┬®ļŖ┬ĘŻ¼Š═╩Ū░č╔ŽłDųąĄ─╚²śO╣▄ōQ│╔ł÷ą¦æ¬╣▄Ż©MOSFETŻ®ĪŻ
Ną═ł÷ą¦æ¬╣▄Ė„éĆČ╦┐┌Ą─├¹ĘQŻ║

ł÷ą¦æ¬╣▄╩ŪļŖē║┐žųŲą═į¬Ų„╝■Ż¼ų╗ę¬ī”¢┼śO╩®╝ėļŖē║Ż¼DSŠ═Ģ■ī¦═©ĪŻ
ĮY(ji©”)ą═ł÷ą¦æ¬╣▄ėąę╗éĆ╠žąįŠ═╩Ū╦³Ą─▌ö╚ļūĶ┐╣ĘŪ│Ż┤¾Ż¼▀@ęŌ╬Čų°Ż║ø]ėąļŖ┴„Å─┐žųŲļŖ┬Ę┴„│÷Ż¼ę▓ø]ėąļŖ┴„▀M╚ļ┐žųŲļŖ┬ĘĪŻø]ėąļŖ┴„┴„╚ļ╗“┴„│÷Ż¼Š═▓╗Ģ■¤²ē─┐žųŲļŖ┬ĘĪŻČ°ļpśOą═Š¦¾w╣▄▓╗═¼Ż¼╩ŪļŖ┴„┐žųŲąįį¬Ų„╝■Ż¼╚ń╣¹╩╣ė├ķ_╝»ļŖ┬ĘŻ¼┐╔─▄Ģ■¤²ē─┐žųŲļŖ┬ĘĪŻ▀@┤¾Ė┼Š═╩Ū╬ęéā┐é╩Ū┬ĀĄĮķ_┬®ļŖ┬ĘČ°║▄╔┘┬ĀĄĮķ_╝»ļŖ┬ĘĄ─įŁę“░╔Ż┐ę“×ķķ_╝»ļŖ┬Ę▒╗╠į╠Ł┴╦ĪŻ
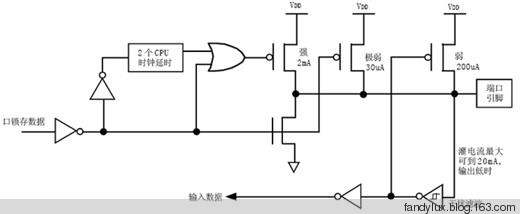
1Īóķ_┬®╚½▓┐├¹ūų╩ŪŻ¼ā╚(n©©i)▓┐mos╣▄┬®śOķ_┬ĘŻ©ę▓┐╔└ĒĮŌ×ķŠ¦¾w╣▄╝»ļŖśOķ_┬ĘŻ®ĪŻ▌ö│÷ę²─_ų╗ėąī”ĄžĄ═ūĶ┐╣ęį╝░Ė▀ūĶæB(t©żi)ā╔ĘN─Ż╩ĮĪŻ
2Īó═Ų═ņā╚(n©©i)▓┐ėą╔ŽŽ┬ā╔éĆmosŻ©╗“Š¦¾w╣▄Ż®Ż¼▌ö│÷ę²─_ėąī”VCCĄ═ūĶ┐╣ęį╝░ī”ĄžĄ═ūĶ┐╣ā╔ĘN─Ż╩ĮĪŻ
Ž┬├µĖČę╗éƤo─X░µĄ─Ż¼ė├ķ_ĻP┤·╠µŠ¦¾w╣▄╗“MOS╣▄ĪŻĄ╚ą¦ļŖ┬ĘĪŻ

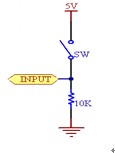
1. ═Ų═ņ▌ö│÷─▄ē“▌ö│÷Ė▀╗“š▀Ą═Ż¼Č°ķ_┬®▌ö│÷ų╗─▄▌ö│÷Ą═Ż¼╗“š▀ĻPķ]▌ö│÷Ż¼ę“┤╦ķ_┬®▌ö│÷┐é╩Ūę¬┼õę╗éĆ╔Ž└ŁļŖūĶ╩╣ė├ĪŻ2. ķ_┬®▌ö│÷Ą─╔Ž└ŁļŖūĶ▓╗─▄╠½ąĪŻ¼╠½ąĪĄ─įÆŻ¼«öķ_┬®▌ö│÷Ą─Ž┬╣▄ī¦═©ĢrŻ¼ļŖį┤ĄĮĄžĄ─ļŖē║į┌ļŖūĶ╔ŽĢ■įņ│╔║▄┤¾Ą─╣”║─Ż¼ę“┤╦▀@éĆļŖūĶūĶųĄ═©│Żį┌10kęį╔ŽŻ¼▀@śėķ_┬®▌ö│÷į┌Å─▌ö│÷Ą═ļŖŲĮŪąōQĄĮĖ▀ļŖŲĮĢrŻ¼╦┘Č╚╩Ū║▄┬²Ą─ĪŻ3. ═Ų═ņ▌ö│÷╚╬ęŌĢr┐╠Ą─▌ö│÷ę¬├┤╩ŪĖ▀Ż¼ę¬├┤╩ŪĄ═Ż¼╦∙ęį▓╗─▄īóČÓéĆ▌ö│÷Č╠ĮėŻ¼Č°ķ_┬®▌ö│÷┐╔ęįīóČÓéĆ▌ö│÷Č╠ĮėŻ¼╣▓ė├ę╗éĆ╔Ž└ŁŻ¼┤╦Ģr▀@ą®ķ_┬®▌ö│÷Ą─“ī(q©▒)äėŲõīŹ╩Ū┼cĘŪĄ─ĻPŽĄĪŻ4. ═Ų═ņ▌ö│÷▌ö│÷Ė▀ĢrŻ¼ŲõļŖē║Ą╚ė┌═Ų═ņļŖ┬ĘĄ─ļŖį┤Ż¼═©│Ż×ķę╗éĆČ©ųĄŻ¼Č°ķ_┬®▌ö│÷Ą─Ė▀╚ĪøQė┌╔Ž└ŁļŖūĶĮėĄ─ļŖē║Ż¼▓╗╚ĪøQė┌Ū░╝ēļŖē║Ż¼╦∙ęįĮø(j©®ng)│Żė├üĒū÷ļŖŲĮ▐D(zhu©Żn)ōQŻ¼ė├Ą═ļŖē║▀ē▌ŗ“ī(q©▒)äėĖ▀ļŖē║▀ē▌ŗŻ¼▒╚╚ń3.3vĦ5vĪŻ
į┌å╬Ų¼ÖCīW┴ĢĪóķ_░l(f©Ī)║═æ¬ė├ųąŻ¼IO┐┌Ą─┼õų├ī”╣”─▄Ą─īŹ¼F(xi©żn)Ųų°ųžę¬Ą─ū„ė├Ż¼Ž┬├µĮķĮB│ŻęŖĄ─╦─ĘN┼õų├Ż¼Č°¼F(xi©żn)į┌║▄ČÓå╬Ų¼ÖCČ╝╝µėą▀@╦─ĘN┼õų├Ż¼┐╔╣®▀xō±ĪŻ
ę╗.£╩ļpŽ“┐┌┼õų├
╚ńŽ┬łDŻ¼«öIO▌ö│÷×ķĖ▀ļŖŲĮĢrŻ¼Ųõ“ī(q©▒)äė─▄┴”║▄╚§Ż¼═Ō▓┐žō▌d║▄╚▌ęūīóŲõ└Łų┴Ą═ļŖŲĮĪŻ«öIO▌ö│÷×ķĄ═ļŖŲĮĢrŻ¼Ųõ“ī(q©▒)äė─▄┴”║▄ÅŖŻ¼┐╔╬³╩šŽÓ«ö┤¾Ą─ļŖ┴„ĪŻ
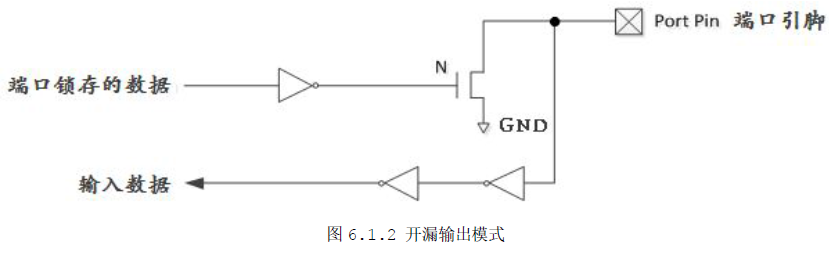
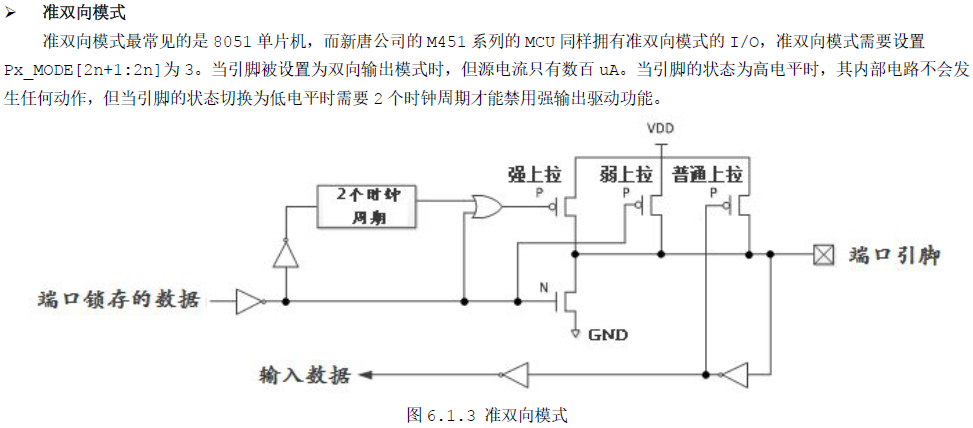
£╩ļpŽ“┐┌ėą╚²éĆ╔Ž└ŁŠ¦¾w╣▄Ż¼ę╗éĆĪ░śO╚§╔Ž└ŁĪ▒Ż¼«öČ╦µi┤µŲ„×ķ▀ē▌ŗĪ░1Ī▒Ģr┤“ķ_Ż¼«öČ╦┐┌æę┐šĢrŻ¼Ī░śO╚§╔Ž└ŁĪ▒īóČ╦┐┌╔Ž└Łų┴Ė▀ļŖŲĮĪŻ
Ą┌Č■éĆ╔Ž└ŁŠ¦¾w╣▄×ķĪ░╚§╔Ž└ŁĪ▒Ż¼«öČ╦┐┌µi┤µŲ„×ķ▀ē▌ŗĪ░1Ī▒ŪęČ╦┐┌▒Š╔Ēę▓×ķĪ░1Ī▒Ģr┤“ķ_Ż¼┤╦╔Ž└Ł╠ß╣®Ą─ļŖ┴„Ż¼╩╣£╩ļpŽ“┐┌▌ö│÷×ķĪ░1Ī▒ĪŻ╚ń╣¹┤╦ĢrČ╦┐┌▒╗═Ō▓┐čbų├└ŁĄĮ▀ē▌ŗĪ░0Ī▒ĢrŻ¼═©▀^╩®├▄╠žė|░l(f©Ī)Ų„Ż¼┐žųŲĪ░╚§╔Ž└ŁĪ▒ĻPķ]Ż¼Č°Ī░śO╚§╔Ž└ŁĪ▒ŠS│ųķ_ĀŅæB(t©żi)Ż¼×ķ┴╦░č▀@éĆČ╦┐┌└ŁĄ═Ż¼═Ō▓┐čbų├▒žĒÜėąūŃē“Ą─╣ÓļŖ┴„─▄┴”Ż¼╩╣╣▄─_╔ŽĄ─ļŖē║Ż¼ĮĄĄĮķTÖæļŖęįŽ┬ĪŻ
Ą┌╚²éĆ╔Ž└ŁŠ¦¾w╣▄×ķĪ░ÅŖ╔Ž└ŁĪ▒Ż¼«öČ╦┐┌µi┤µŲ„ė╔Ī░0Ī▒╠°ūāĄĮĪ░1Ī▒ĢrŻ¼▀@éĆ╔Ž└Łė├üĒ╝ė┐ņČ╦┐┌ė╔▀ē▌ŗĪ░0Ī▒ĄĮ▀ē▌ŗĪ░1Ī▒Ą─▐D(zhu©Żn)ōQ╦┘Č╚ĪŻ
£╩ļpŽ“┐┌ū÷×ķ▌ö╚ļĢrŻ¼═©éĆę╗éĆ╩®├▄╠žė|╚ńŲ„║═ę╗éĆĘŪķTŻ¼ė├ęįĖ╔ö_║═×V▓©ĪŻ
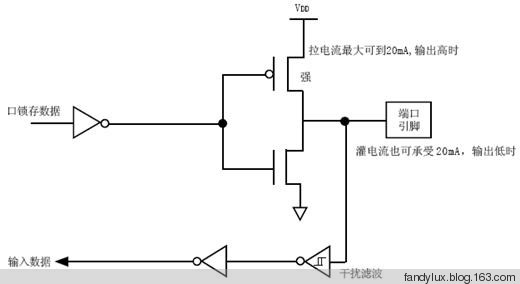
£╩ļpŽ“┐┌ė├ū„▌ö╚ļĢrŻ¼┐╔ī”ĄžĮė░┤µIŻ¼╚ńŽ┬łD1Ż¼«ö╚╗ę▓┐╔ęį╚źĄ¶R1ų▒ĮėĮė░┤µIŻ¼«ö░┤µIķ]║ŽĢrŻ¼Č╦┐┌▒╗└Łų┴Ą═ļŖŲĮŻ¼«ö░┤µI╦╔ķ_ĢrŻ¼Č╦┐┌▒╗ā╚(n©©i)▓┐Ī░śO╚§╔Ž└ŁĪ▒Š¦¾w╣▄└Łų┴Ė▀ļŖŲĮĪŻ«öČ╦┐┌ū„×ķ▌ö│÷ĢrŻ¼▓╗æ¬ī”Ąž═ŌĮėLED╚ńłDą╬┐žųŲŻ¼▀@śėČ╦┐┌Ą─“ī(q©▒)äė─▄┴”║▄╚§Ż¼LEDų╗─▄░l(f©Ī)║▄╬ó╚§Ą─╣ŌŻ¼╚ń╣¹ę¬“ī(q©▒)äėLEDŻ¼ę¬▓╔ė├łD3Ą─ĘĮĘ©Ż¼▀@śė£╩ļpŽ“┐┌į┌▌ö│÷×ķĄ═ĢrŻ¼┐╔╬³╩š20mAĄ─ļŖ┴„Ż¼╣╩─▄“ī(q©▒)äėLEDĪŻłD4Ą─ĘĮĘ©ę▓┐╔ęįŻ¼▓╗▀^LED▓╗░l(f©Ī)╣ŌĢrŻ¼Č╦┐┌ę¬╬³╩š╩š║▄┤¾ļŖ┴„ĪŻ

Č■.ķ_┬®▌ö│÷┼õų├
▀@ĘN┼õų├Ż¼ĻPķ]╦∙ėą╔Ž└ŁŠ¦¾w╣▄Ż¼ų╗“ī(q©▒)äėŽ┬└ŁŠ¦¾w╣▄Ż¼Ž┬└Ł┼c£╩ļpŽ“┐┌Ž┬└Ł┼õų├ŽÓ═¼Ż¼ę“┤╦ų╗─▄▌ö│÷Ą═ļŖŲĮŻ©╬³╩šļŖ┴„Ż®Ż¼║═Ė▀ūĶĀŅæB(t©żi)ĪŻ▓╗─▄▌ö│÷Ė▀ļŖŲĮŻ©▌öę▓ļŖ┴„Ż®ĪŻ╚ń╣¹ę¬ū„×ķ▀ē▌ŗ▌ö│÷Ż¼▒žĒÜĮė╔Ž└ŁļŖūĶĄĮVCCĪŻ▀@ĘN┼õų├ę▓┐╔ęį═©▀^╔ŽłD3║═łD4üĒ“ī(q©▒)äėLEDĪŻ
╚².═Ų═ņ▌ö│÷┼õų├
▀@ĘN┼õų├Ą─Ž┬└Ł┼c£╩ļpŽ“┐┌║═ķ_┬®┼õų├ŽÓ═¼Ż¼Š▀ėą▌^ÅŖĄ─└ŁļŖ┴„─▄┴”Ż¼▓╗═¼Ą─╩ŪŻ¼Š▀ėą│ų└m(x©┤)Ą─ÅŖ╔Ž└ŁĪŻę“┤╦┐╔ęįė├╔ŽłD2Ą─ĘĮĘ©üĒ“ī(q©▒)äėLEDĪŻ
╦─.āH×ķ▌ö╚ļ┼õų├Ż©Ė▀ūĶ┼õų├Ż®
▀@ĘN┼õų├▓╗─▄▌ö│÷ļŖ┴„Ż¼ę▓▓╗─▄ėą╩šļŖ┴„Ż¼ų╗─▄ū„×ķ▌ö╚ļöĄ(sh©┤)ō■(j©┤)╩╣ė├ĪŻ

ęį╔Ž╦─ĘN┼õų├Ė„ėąŲõ╠ž³cŻ¼į┌╩╣ė├ųąæ¬Ė∙ō■(j©┤)Ųõ╠ž³cņ`╗Ņ▀\ė├ĪŻ
£╩ļpŽ“┐┌Ą─ūŅ┤¾╠ž³c╩Ū╝╚┐╔ęįū„×ķ▌ö╚ļŻ¼ę▓┐╔ęįū„×ķ▌ö│÷Ż¼▓╗ąĶę¬═©▀^┐žųŲŪąōQĪŻ
═Ų═ņ▌ö│÷Ą─╠ž³c╩ŪŻ¼¤ošō▌öę▓Ė▀ļŖŲĮ▀Ć╩ŪĄ═ļŖŲĮČ╝ėą▌^┤¾Ą─“ī(q©▒)äė─▄┴”Ż¼į┌▌öę▓Ė▀ļŖŲĮĢrŻ¼ę▓─▄ų▒Įė³c┴┴LEDŻ¼▀@į┌£╩ļpŽ“┐┌ųą╩Ū▓╗─▄▐kĄĮĄ─ĪŻ▀@ĘN┼õų├▓╗ę╦ū„×ķ▌ö╚ļŻ¼ę“×ķ▀@ąĶę¬═Ō▓┐įOéõėą║▄ÅŖĄ─└ŁļŖ┴„Ą──▄╬ĖĪŻ
āH×ķ▌ö╚ļ┼õų├Ą─╠ž³c╩ŪČ╦┐┌ų╗─▄ū„×ķ▌ö╚ļ╩╣ė├Ż¼┐╔ęį½@Ą├║▄Ė▀Ą─▌ö╚ļūĶ┐╣Ż¼į┌ėą─ŻöM▒╚▌^Ų„╗“ADCĄ─Č╦┐┌ųąė├Ą├▌^ČÓĪŻ
ķ_┬®▌ö│÷┼õų├┼c£╩ėųŽ“┐┌ŽÓ╦ŲŻ¼Ą½ā╚(n©©i)▓┐ø]ėą╔Ž└ŁļŖūĶĪŻėą║▄║├Ą─ļŖÜŌ╝µ╚▌ąįŻ¼═Ō▓┐Įė╔Ž└ŁļŖūĶĄĮ3VļŖį┤Ż¼Š═─▄║═3V▀ē▌ŗŲ„╝■▀BĮėĪŻ═Ō▓┐Įė╔Ž└ŁļŖūĶĄĮ5VļŖį┤Ż¼Š═ę¬ęį║═5VŲ„╝■▀BĮėĪŻ
ąĶ꬚f├„Ą─╩Ūęį╔Ž╦─ĘN┼õų├Š∙┐╔ęįū„×ķ▌ö╚ļŻ¼ę▓Š═╩ŪČ╝┐╔ęįÖz£yČ╦Ą─▀ē▌ŗĀŅæB(t©żi)Ż¼Ą½Ųõ╠žąį▓╗═¼Ż¼▓╗╩Ū├┐ĘN┼õų├Č╝┐╔ęįų▒ĮėĮė░┤µI
Š═ųvĄĮ▀@└’Ż¼ŲõīŹ▀@Š═╩ŪI/O┐┌Ą─▌ö╚ļ▌ö│÷─Ż╩ĮŻ¼Š▀¾w┐┤│╠ą“Š═┐╔ęįŪÕ│■├„░ū┴╦
GPIO_SetMode(PC, BIT7, GPIO_MODE_OUTPUT);//#define GPIO_MODE_OUTPUT 0x0UL /*!< Input Mode */
įOų├│╔×ķ┴╦▌ö│÷─Ż╩ĮŻ¼ų«║¾╬ęéāį┌üĒ┐┤Ż¼▀@éĆ║»öĄ(sh©┤)Ą─Š▀¾w╣”─▄
while(1) { for(i = 0; i < 9; i++) { Write_LED_Bar(i); for(j = 0; j < 600; j++) CLK_SysTickDelay(1000); } }
#define _LED1 PB2#define _LED2 PB3#define _LED3 PC3#define _LED4 PC2#define _LED5 PA9#define _LED6 PB1#define _LED7 PC7
#define _LED_Bar_Count 7 void Write_LED_Bar(uint32_t Number) { uint32_t i; volatile uint32_t *ptrLED[_LED_Bar_Count] = {&_LED1, &_LED2, &_LED3, &_LED4, &_LED5, &_LED6, &_LED7}; for(i = 0; i < _LED_Bar_Count; i++) { if((Number > i) & 0x01) *ptrLED[i] = 0; //LED ON else *ptrLED[i] = 1; //LED OFF } }
╚ń╣¹╬ęéā╝┘įONumber×ķę╗Ą─įÆŻ¼i×ķ┴ŃĢrŻ¼1┤¾ė┌┴Ń,×ķšµŻ¼×ķę╗Ż¼ė÷╔Ž0X01ų«║¾×ķšµŻ¼ät▀MąąžōųĄ×ķ┴ŃŻ©ķ_¤¶Ż®Ą─▓┘ū„Ż¼╦³╩Ū╣▓Ļ¢╝ēĄ─▓┘ū„ĪŻ
įćįć╬ęīæĄ─▀@éĆ
#define _LED1 PB2#define _LED2 PB3#define _LED3 PC3#define _LED4 PC2#define _LED5 PA9#define _LED6 PB1#define _LED7 PC7
volatile uint32_t *ptrLED[_LED_Bar_Count] = {&_LED1, &_LED2, &_LED3, &_LED4, &_LED5, &_LED6, &_LED7};
while(1) { for(i = 0; i < 7; i++) { *ptrLED[i]=0; for(j = 0; j < 600; j++) { CLK_SysTickDelay(1000); } *ptrLED[i]=1; for(j = 0; j < 600; j++) { CLK_SysTickDelay(1000); } if(i==8) { i=0; } } }
▀@└’ąĶꬥ─Äņ╬─╝■ėą║▄ČÓŻ¼┴Ē═ŌLED║▄║åå╬Ż¼▓╗ąĶę¬ė├ĄĮ║▄ČÓĄ─Äņ║»öĄ(sh©┤)Ż¼Ž┬╗ž╬ęšfšfGPIO.H░╔!
╔Žę╗Ų¬Ż║╬─ÖnĄ─ē║┐s┼c┤“░³
Ž┬ę╗Ų¬Ż║šfšfSPIģf(xi©”)ūh

Æ▀┤aĻPūó╬ęéā
Ó]ŽõŻ║ivy@yingtexin.net
ĄžųĘŻ║╔Ņ█┌╩ą²ł╚Aģ^(q©▒)├±ų╬ĮųĄ└├±ų╬┤¾Ą└973╚f▒ŖØÖžSäō(chu©żng)śI(y©©)ł@AŚØ2śŪA09



ŽĄ┐═Ę■")
ŽĄ┐═Ę■")
ŽĄ┐═Ę■")
ŽĄ┐═Ę■")
