





基于MM32SPIN電機(jī)/電源專用芯片的無(wú)傳感弦波驅(qū)動(dòng)應(yīng)用方案——手持式吸塵器
1. 簡(jiǎn)介在生活水平高度現(xiàn)代化的今天,吸塵器已經(jīng)成了清潔家庭的智慧家庭必備小家電。吸塵器是利用電機(jī)高速運(yùn)轉(zhuǎn),形成空氣負(fù)壓,使塵箱內(nèi)局部真空,從而吸附塵屑這一運(yùn)作原理完成清掃的一種現(xiàn)代清潔工具。主要由起塵、吸塵、濾塵三部分組成。本文簡(jiǎn)單介紹基于MM32SPIN25的無(wú)傳感弦波驅(qū)動(dòng)技術(shù)于“手持式吸塵器”的應(yīng)用實(shí)例。
方案特色:
ARM Cortex-M0高性能電機(jī)驅(qū)動(dòng)專用芯片
主頻高達(dá)96MHz
內(nèi)建32位硬件除法器
內(nèi)建多組比較器和運(yùn)放
180度無(wú)傳感弦波驅(qū)動(dòng)
電機(jī)轉(zhuǎn)速可達(dá)100000rpm (2極電機(jī))
速度命令輸入可為模擬電壓或PWM信號(hào), 並可由FG反饋實(shí)際轉(zhuǎn)速
定轉(zhuǎn)速或恒功率運(yùn)轉(zhuǎn)
支持多種數(shù)據(jù)通信接口:UART \ IIC \ SPI
完整的保護(hù)機(jī)制: 過(guò)流保護(hù)、過(guò)壓保護(hù)、欠壓保護(hù)、過(guò)溫保護(hù)、堵轉(zhuǎn)保護(hù)、進(jìn)風(fēng)口堵塞保護(hù)
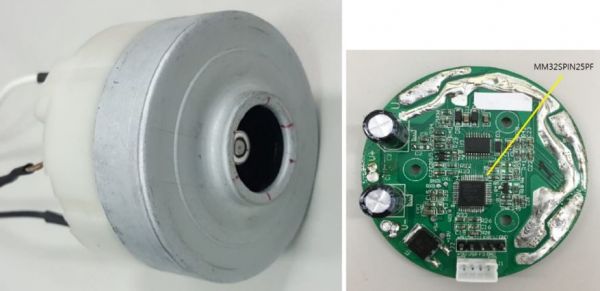
圖1. 左圖:常見的25.2V/380W手持式吸塵器電機(jī);
右圖:采用MM32SPIN25PF之驅(qū)動(dòng)板
2. 無(wú)傳感弦波驅(qū)動(dòng)技術(shù)原理
于此介紹無(wú)傳感弦波驅(qū)動(dòng)的技術(shù)原理與實(shí)現(xiàn)方法.
下圖2為弦波磁場(chǎng)導(dǎo)向驅(qū)動(dòng)電機(jī)控制框圖。流程一開始是由外部輸入訊號(hào)讀取目標(biāo)速度命令, 經(jīng)過(guò)閉回路加速度斜率控制器運(yùn)算后, 得到可提供速度PI控制器的速度命令,接著用此速度命令與反饋的實(shí)際速度, 經(jīng)由PI 控制器計(jì)算之后產(chǎn)生力矩電流命令I(lǐng)q。
磁場(chǎng)導(dǎo)向控制器(FOC)功能方塊接收到此力矩電流命令及電機(jī)的估測(cè)角度后, 經(jīng)過(guò)三相電流的反饋、坐標(biāo)轉(zhuǎn)換、 電流環(huán)PI計(jì)算、及空間矢量調(diào)制(SVPWM)等法則運(yùn)算, 由此獲得要逼近目標(biāo)轉(zhuǎn)速所需求的三相PWM占空比數(shù)據(jù), 之后將此數(shù)據(jù)產(chǎn)生PWM輸出給予外部的電力驅(qū)動(dòng)組件, 以此驅(qū)動(dòng)電機(jī)運(yùn)轉(zhuǎn)。
在磁場(chǎng)導(dǎo)向控制器功能方塊產(chǎn)生PWM 訊號(hào)的過(guò)程中, 滑模估測(cè)器(SMO)功能方塊負(fù)責(zé)產(chǎn)生電機(jī)運(yùn)轉(zhuǎn)所需要的估測(cè)角度及速度。
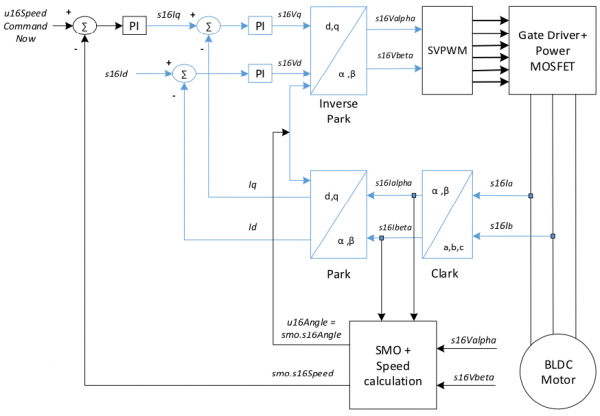
圖2. 無(wú)傳感弦波磁場(chǎng)導(dǎo)向(FOC)軟件控制框圖
下圖3為滑模角度估測(cè)系統(tǒng)細(xì)部的框圖, 滑模角度估測(cè)器由四個(gè)主要功能方塊所組成。首先由電流估測(cè)器產(chǎn)生估測(cè)電流, 并用此估測(cè)電流與量測(cè)的實(shí)際電流Ialfa, Ibeta的差值, 經(jīng)過(guò)bang-bang 控制與低通濾波功能方塊運(yùn)算后, 產(chǎn)生估測(cè)的BEMF電壓值Ealfa, Ebeta, 將此估測(cè)的電壓值經(jīng)過(guò)反正切的計(jì)算后即可得到估測(cè)的轉(zhuǎn)子角度。
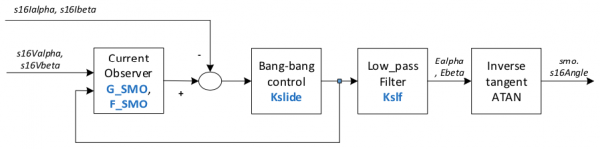
圖3. 滑模估測(cè)(SMO)轉(zhuǎn)子角度估測(cè)軟件控制框圖
本方案的磁場(chǎng)導(dǎo)向控制(FOC)主要有三個(gè)坐標(biāo)轉(zhuǎn)換計(jì)算, Clarke轉(zhuǎn)換、Park轉(zhuǎn)換及逆變換Park轉(zhuǎn)換, 目的是要能夠控制電機(jī)的磁場(chǎng)電流Id及力矩電流Iq, 以實(shí)現(xiàn)電機(jī)的轉(zhuǎn)速控制。這個(gè)理論是由F. Blaschke 在1972年所提出的。
Clarke 坐標(biāo)轉(zhuǎn)換:
目的是將三相電流的三軸(a, b, c)坐標(biāo)系統(tǒng)轉(zhuǎn)換為2軸坐標(biāo)系統(tǒng)。以下算式為Clarke 坐標(biāo)轉(zhuǎn)換方程式。
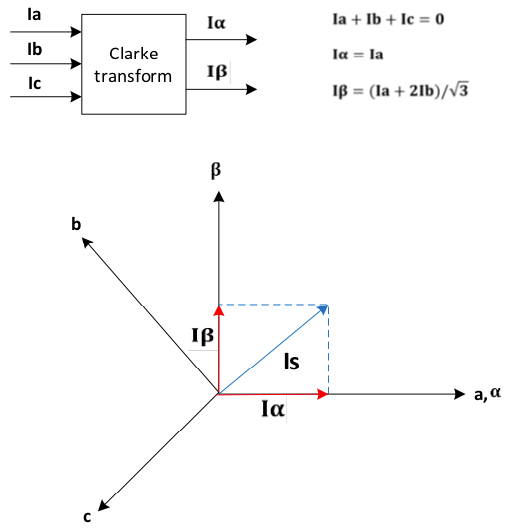
圖4. Clarke 坐標(biāo)轉(zhuǎn)換及其方程式
Park 坐標(biāo)轉(zhuǎn)換:
將靜態(tài)的2軸坐標(biāo)系統(tǒng)轉(zhuǎn)換為電機(jī)同步旋轉(zhuǎn)的2軸(d, q)坐標(biāo)系統(tǒng)。d軸表轉(zhuǎn)子磁通電流方向及大小, q軸表力矩電流。以下算式為Park 坐標(biāo)轉(zhuǎn)換方程式。
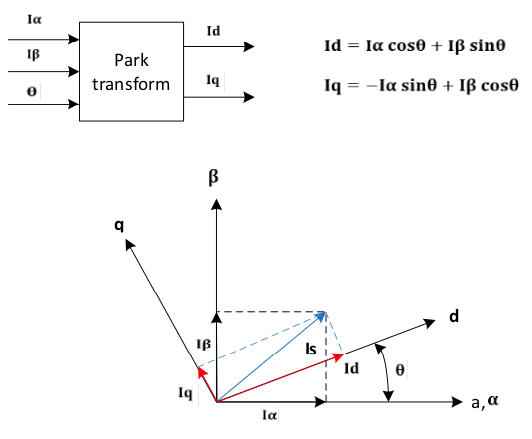
圖5. Park 坐標(biāo)轉(zhuǎn)換及其方程式
逆變換Park 的坐標(biāo)轉(zhuǎn)換:
將電機(jī)同步旋轉(zhuǎn)的2軸(d, q)坐標(biāo)系統(tǒng)轉(zhuǎn)換回靜態(tài)的2軸坐標(biāo)系統(tǒng)。以下算式為逆變換Park的坐標(biāo)轉(zhuǎn)換方程式。
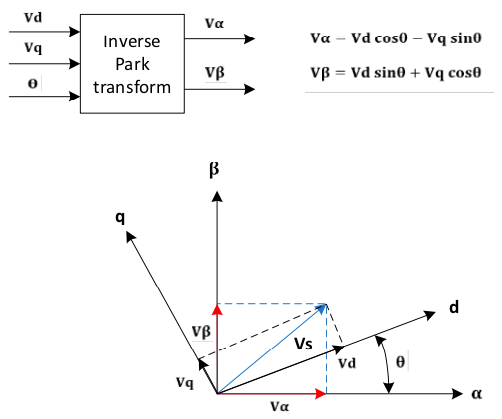
圖6. 逆變換Park 坐標(biāo)轉(zhuǎn)換及其方程式
3. 硬件設(shè)計(jì)
MM32SPIN25PF內(nèi)建的比較器和運(yùn)放,簡(jiǎn)化了電機(jī)驅(qū)動(dòng)板的設(shè)計(jì).手持式吸塵器電機(jī)驅(qū)動(dòng)板的參考原理圖如下: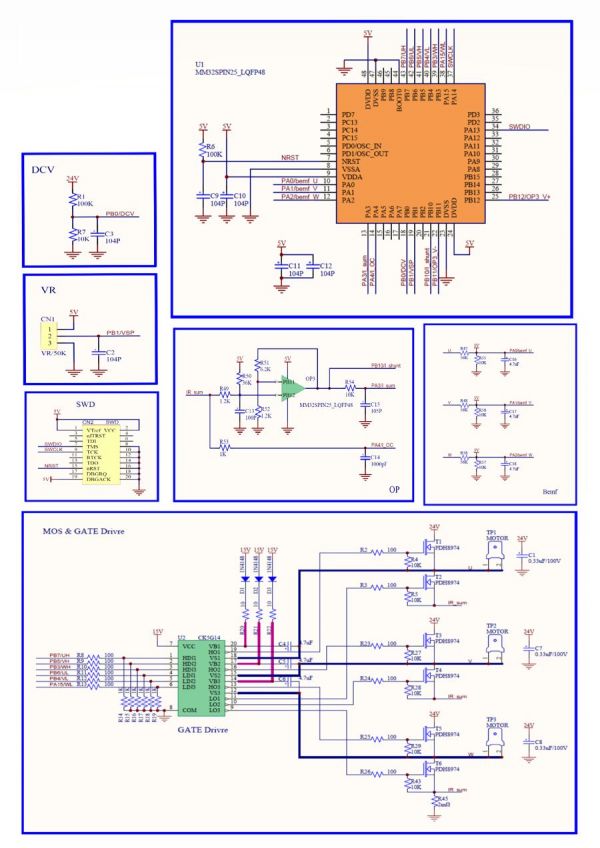
圖7. 基于MM32SPIN25PF的手持式吸塵器
電機(jī)驅(qū)動(dòng)板原理圖
4. 弦波驅(qū)動(dòng)的相電流波形
本應(yīng)用案例采用180度弦波驅(qū)動(dòng),在300W運(yùn)轉(zhuǎn)下的相電流波形如下:
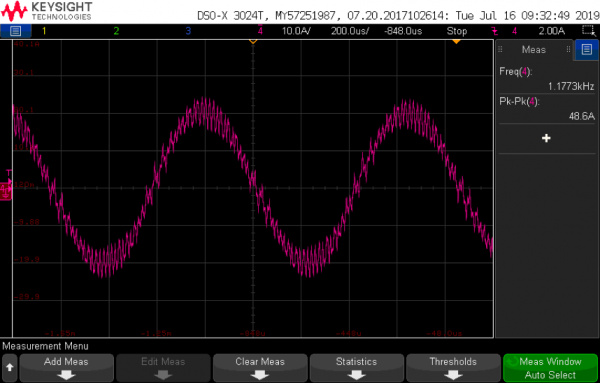
圖8. 300W運(yùn)轉(zhuǎn)下的弦波相電流波形
堵住進(jìn)風(fēng)口時(shí)的轉(zhuǎn)速可達(dá)100000rpm,弦波相電流波形如下:
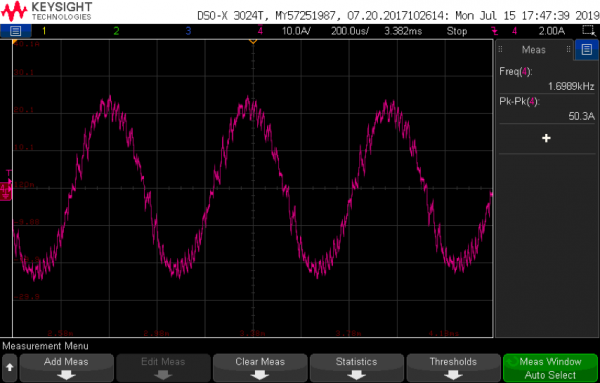
圖9. 進(jìn)風(fēng)口堵塞時(shí)的相電流波形
5. 結(jié)論
MM32SPIN25PF是靈動(dòng)微電子推出的高性能電機(jī)驅(qū)動(dòng)專用芯片,高達(dá)96MHz的主頻及32位硬件除法器能滿足無(wú)傳感磁場(chǎng)導(dǎo)向(FOC)弦波算法的高速運(yùn)算需求。其內(nèi)建的比較器和運(yùn)放,更大大地簡(jiǎn)化了電機(jī)驅(qū)動(dòng)板的設(shè)計(jì),減少了整套方案BOM成本,給客戶提供超具競(jìng)爭(zhēng)力的方案。

編輯:ls 最后修改時(shí)間:2022-06-10

系客服")
系客服")
系客服")
系客服")
