





ņ`äė╬óļŖūė MM32SPIN360C ļŖÖCķ_░l(f©Ī)░Õ“īäėėąĖą BLDC Ą─▓┘ū„ĘĮĘ©
ę╗ĪóMM32SPIN360C ļŖÖCķ_░l(f©Ī)░ÕĮķĮB1.║åĮķ
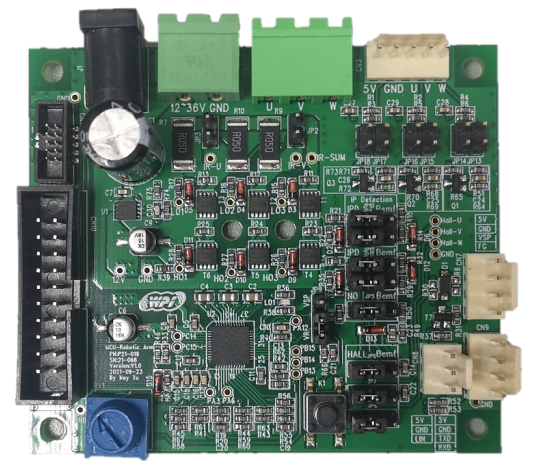
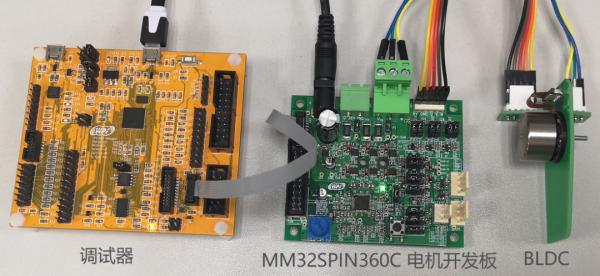
╚ńłDŻ©1Ż®Ż¼MM32SPIN360C ļŖÖCķ_░l(f©Ī)░Õęį Mindmotion Ą─īŻė├ MCU Ī¬Ī¬ MM32SPIN360C ×ķų„┐žųŲŲ„Ż¼Š▀éõ╗¶Ā¢é„ĖąŲ„Öz£y║═Ę┤ļŖäėä▌Öz£y╣”─▄ĪŻ▀mė├ė┌Ą═ē║ł÷║ŽŻ¼┐╔ÅVĘ║ė├ė┌╣żśI(y©©)╗“š▀├±ė├ŅIė“Ą─╚²ŽÓ¤o╦óė└┤┼ļŖÖC“īäėŲ„Ż¼╚ńļŖäė╣żŠ▀Ą╚ĪŻ
ų„┐žųŲŲ„ MM32SPIN360C ╩Ū ARM Cortex-M0 Ą─ 32 ╬╗╬ó┐žųŲŲ„Ż¼ā╚ų├ 5V ▌ö│÷Ą─ LDO ĘĆ(w©¦n)ē║Ų„Ż©Input : 7~13.5VŻ®Ż¼ā╚ų├ 3 ĮMŠ▀ėąūį┼eČ■śO╣▄Ą─ N £ŽĄ└░ļś“¢┼śO“īäėŲ„Ż©7~48VĪó1A SinkĪó1A SourceŻ®Ż¼ęį╝░ 3 éĆ▒╚▌^Ų„║═ 3 éĆ▀\╦ŃĘ┼┤¾Ų„Ą╚Ą╚ĪŻMM32SPIN360C Ą─Š▀¾wģóöĄ(sh©┤)║═ė├Ę©šłģó┐╝ņ`äė╬óĄ─╣┘ŠW(w©Żng)Ż©https://www.mindmotion.com.cn/Ż®╔ŽĄ─öĄ(sh©┤)ō■(j©┤)╩ųāį║═ė├æ¶╩ųāįĪŻ
łDŻ©1Ż®
2.ļŖ┬Ę░ÕłDĮŌ
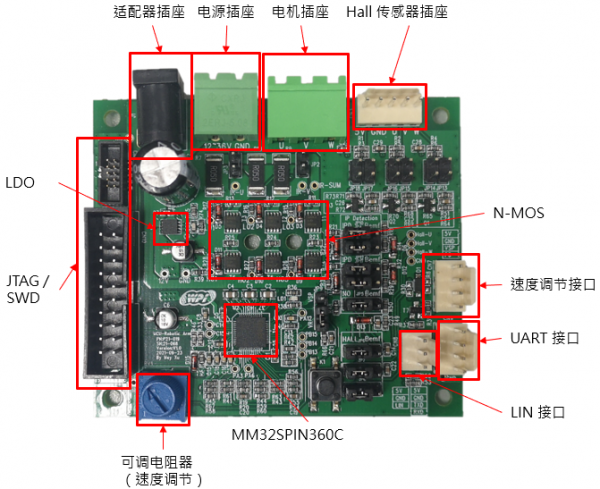
╚ńłDŻ©2Ż®×ķļŖ┬Ę░Õš²├µĄ─łDĮŌŻ¼ķ_░l(f©Ī)░ÕĦėą 10K”Ė ┐╔š{ļŖūĶŲ„Ż¼┐╔ė├ė┌š{╣Ø(ji©”)ļŖÖCĄ─▐D╦┘ĪŻÄ¦ėą UART/LIN ═©ėŹĮė┐┌Ż¼ęį╝░ā╔ĘNą╬╩ĮĄ─ JTAG/SWD Įė┐┌ĪŻļŖį┤▌ö╚ļļŖē║×ķ 12~36VŻ¼┐╔ęįėąā╔ĘNĮė╚ļĘĮ╩ĮŻ©DC-JACK ╗“š▀ ĮėŠĆČ╦ūėŻ®ĪŻ
łDŻ©2Ż®
3.įŁ└ĒłDĮķĮB
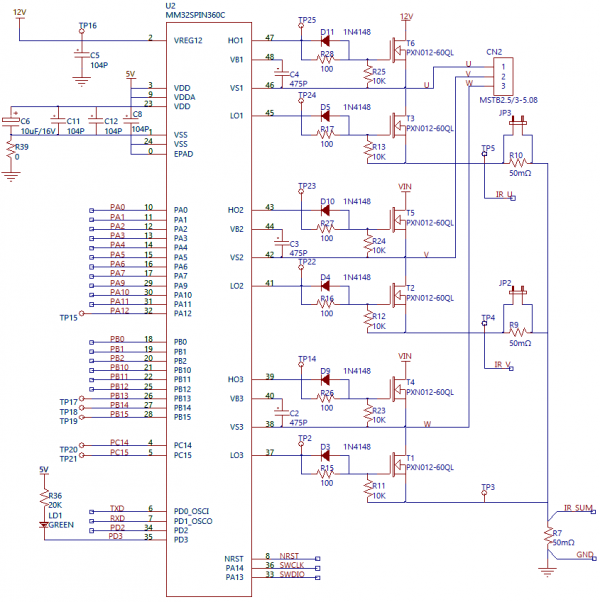
łDŻ©3Ż®╩ŪļŖÖC“īäė▓┐ĘųĄ─įŁ└ĒłDĪŻė╔ė┌ MM32SPIN360C ▀@Ņw MCU ā╚ūįĦŅA“īŻ¼╦∙ęį┐╔ęįų▒Įė“īäė MOS ╣▄Ż©PXN012-60QLŻ®Ż¼║å╗»┴╦ļŖÖC“īäėļŖ┬ĘĪŻ
łDŻ©3Ż®
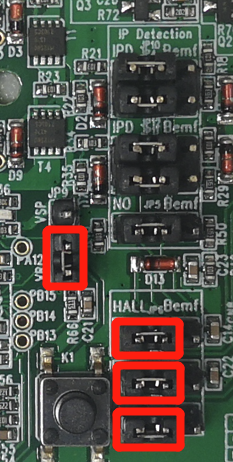
łDŻ©4Ż®╩ŪĘ┤üļŖ┬ĘŻ¼┐╔ęį═©▀^ JP4~JP8Ż¼JP10~JP12 ▀xō±╗¶Ā¢é„ĖąŲ„ĘĮ╩ĮĘ┤ü╗“š▀╩ŪĘ┤ļŖäėä▌ĘĮ╩ĮĘ┤üĪŻ╚ń╣¹▀xō±╗¶Ā¢é„ĖąŲ„ĘĮ╩ĮŻ¼ätų╗ąĶę¬īó JP6ĪóJP7ĪóJP8 Ą─ 1-2 ─_Č╠ĮėĪŻ
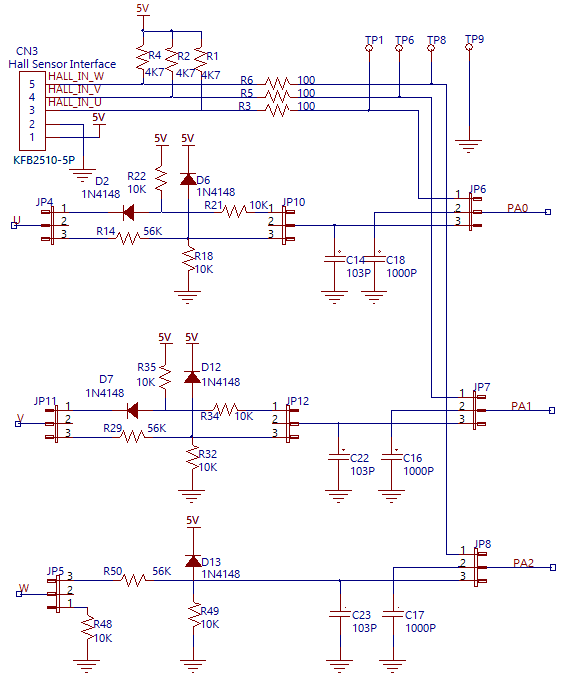
łDŻ©4Ż®
Č■Īó “īäė▄ø╝■║åĮķ
1.åóäėļŖÖC┤╦“īäė▄ø╝■╩ūŽ╚═©▀^ 12-bit ADC ▓╔╝»┐╔š{ļŖūĶŲ„Ą─ļŖūĶųĄŻ¼┤_Č©ļŖÖCĄ─▐D╦┘ĪŻ«öļŖÖC╦┘Č╚Ą─ PWM ▓©ą╬š╝┐š▒╚┤¾ė┌ 5% ▓┼ķ_╩╝åóäėļŖÖCĪŻļŖÖCåóäėų«Ū░═©▀^ūx╚Ī U/V/W Ą─ 3 éĆ╗¶Ā¢é„ĖąŲ„Ą─ųĄ┤_Č©ļŖÖC▐Dūė╬╗ų├Ż¼▀MČ°Ė∙ō■(j©┤)▐Dūė╬╗ų├üĒ┤_Č© U/V/W Ą─╔ŽļŖĒśą“ĪŻ
//RM ą²Ōoåóäė┼cš{╦┘
do {
hwAdcValue = GetAdcAverage(5); // ▓╔╝»┐╔š{ūāūĶŲ„Ą─ļŖē║ųĄ
if (0xffff == hwAdcValue) {
break;
} else {
g_tMotor.tDuty = hwAdcValue * 100 / 4095; // įOų├ PWM š╝┐š▒╚
SET_DUTY_U(g_tMotor.tDuty);
SET_DUTY_V(g_tMotor.tDuty);
SET_DUTY_W(g_tMotor.tDuty);
if ((g_tMotor.tDuty > 5) && (g_tMotor.tMotorState == STOP)) {
g_tMotor.tMotorState = START; // ╚ń╣¹ļŖÖC╦┘Č╚Ą─▓©ą╬š╝┐š▒╚┤¾ė┌ 5%Ż¼ätåóäėļŖÖC
}
}
} while(0);
2.╗¶Ā¢é„ĖąŲ„ą┼╠¢Ą─▓╔╝»
▄ø╝■ųą░³║¼ 3 ĘN╗¶Ā¢é„ĖąŲ„ą┼╠¢▓╔╝»ĘĮ╩ĮŻ║ų„裣h(hu©ón)ĪóEXTIĪóTimer ĪŻ
ų„裣h(hu©ón) ĘĮ╩Į╩Ūį┌ų„║»öĄ(sh©┤)Ą─ while(1) 裣h(hu©ón)└’ūx╚Ī U/V/W ▀@ 3 éĆ╗¶Ā¢é„ĖąŲ„ī”æ¬Ą─ MCU ╣▄─_Ż©PA0/PA1/PA2Ż®╔ŽĄ─ļŖŲĮ, ▀MČ°“īäėōQŽÓĪŻ
EXTI ĘĮ╩Į╩ŪįOų├ U/V/W ▀@ 3 éĆ╗¶Ā¢é„ĖąŲ„ī”æ¬Ą─ MCU ╣▄─_Ż©PA0/PA1/PA2Ż®×ķ═Ō▓┐ųąöÓŻ¼ļp▀ģčžė|░l(f©Ī)ĪŻ«ö╚╬ę╗ HALL ŠĆ╔ŽļŖŲĮ░l(f©Ī)╔·ūā╗»ĢrŻ¼Č╝Ģ■ėąī”æ¬ųąöÓŠĆ«a(ch©Żn)╔·ųąöÓŻ¼į┌ EXTI ųąöÓĘ■äš║»öĄ(sh©┤)ųą▀Mąą HALL ę²─_ļŖŲĮÖz£yŻ¼▀MČ°“īäėōQŽÓĪŻ
Timer ĘĮ╩Į╩ŪįOų├ U/V/W ▀@ 3 éĆ╗¶Ā¢é„ĖąŲ„ī”æ¬Ą─ MCU ╣▄─_Ż©PA0/PA1/PA2Ż®×ķČ©ĢrŲ„▌ö╚ļ─_ ( CC1ĪóCC2ĪóCC3)ĪŻ╩╣ė├▀@ 3 éĆČ©ĢrŲ„▌ö╚ļ─_═©▀^ę╗éĆ«É╗“ķT▀BĮėĄĮ TI1 ▌ö╚ļ═©Ą└Ż╗«ö▓Č½@ĄĮ CC1ĪóCC2ĪóCC3 ╔Žėąę²─_░l(f©Ī)╔·ļŖŲĮūā╗»ĢrŻ¼ė╔ė┌«É╗“ķTĄ─┤µį┌Ż¼ TI1 ╔Ž«a(ch©Żn)╔·ę╗éĆ╠°ūā螯╗Įø(j©®ng)▀^▌ö╚ļ×V▓©Ų„║═▀ģčžÖz£yŲ„║¾é„▌öĮo TI1F_ED Ż¼ė╔ė┌┼õų├┴╦ TIM Ą─ė|░l(f©Ī)į┤×ķ TI1F_ED ║═╩╣─▄┴╦ė|░l(f©Ī)ųąöÓŻ¼▀@└’Ģ■▀M╚ļė|░l(f©Ī)ųąöÓŻ¼į┌ė|░l(f©Ī)ųąöÓųą╬ęéā┐╔ęį┼ąöÓ╗¶Ā¢ĀŅæB(t©żi)Ą─ėąą¦ųĄŻ¼Ė∙ō■(j©┤)╗¶Ā¢ĀŅæB(t©żi)Ą─ėąą¦ųĄ┐žųŲļŖÖCī”æ¬Ą─└@ĮM╣®ļŖŻ¼▀MČ°“īäėļŖÖCą²▐DĪŻ
▀@ 3 ĘNĘĮ╩Į┐╔ęį═©▀^ hall.h ųąĄ─╚ńŽ┬Č©┴xüĒ▀xō±Ż║
#define HALL_POLLING_MODE 0 // 1Ż║▓╔ė├ ų„裣h(hu©ón) ĘĮ╩Į▓╔╝»╗¶Ā¢ą┼╠¢
#define HALL_TIM_MODE 1 // 1Ż║▓╔ė├ Timer ĘĮ╩Į▓╔╝»╗¶Ā¢ą┼╠¢
#define HALL_EXTI_MODE 0 // 1Ż║▓╔ė├ EXTI ĘĮ╩Į▓╔╝»╗¶Ā¢ą┼╠¢
ļŖÖCČ┬▐DÖz£y
“īäė▄ø╝■ųąķ_åó┴╦ŽĄĮy(t©»ng)╣Ø(ji©”)┼─Č©ĢrŲ„Ż©systickŻ®Ż¼├┐ 1 ║┴├ļųąöÓę╗┤╬ĪŻ┤╦Č©ĢrŲ„ė├ė┌Öz£yļŖÖC▀\▐DĢrČ┬▐D 2 ├ļų«║¾Ż¼═Żų╣ļŖÖC▀\ąąĪŻ
void Systick_Callback(void)
{
if(RUN == g_tMotor.tMotorState) {
g_tMotor.tCount.hwTimeCount ++;
if(g_tMotor.tCount.hwTimeCount > 2000) { // 2s│¼ĢrŻ¼ļŖÖC┐©ūĪ▓╗▀\▐D│¼▀^2sĢrķg
GATE_DRIVER_DISABLE();
BLDC_UVW_DISABLE();
g_tMotor.tMotorState = STOP;
g_tMotor.tMotorErr = LOCKED_ERR;
g_tMotor.tCount.hwTimeCount = 0;
}
}
}
╚²Īóš{įćķ_░l(f©Ī)░Õ
1.ĮėŠĆĘĮĘ©
ķ_░l(f©Ī)░ÕĪóBLDC ļŖÖCĪóš{įćŲ„Ą─ĮėŠĆłD╚ńłDŻ©8Ż®╦∙╩ŠĪŻ
łDŻ©8Ż®
2.š{įćŲ„Ą─įOų├
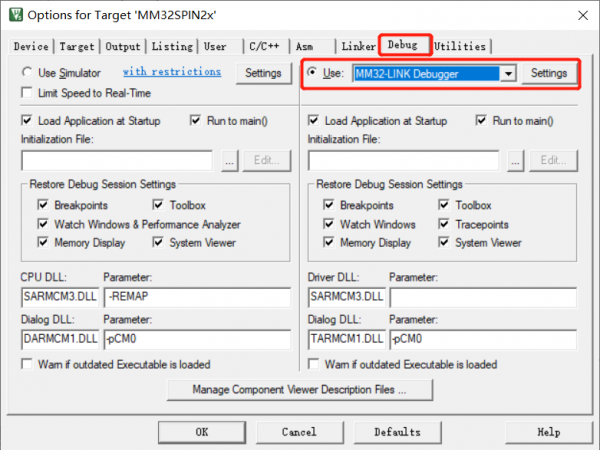
ķ_░l(f©Ī)░Õ▓╔ė├ SWD Įė┐┌š{įćĪŻš{įćŲ„┐╔ęį▓╔ė├ņ`äė╬ó╣┘ĘĮĄ─š{įćŽ┬▌dŲ„Ż¼ę▓┐╔ęį▓╔ė├▀mė├ė┌ ARM Cortex-M ║╦Ą─š{įćŲ„Ż¼▒╚╚ńłDŻ©8Ż®ė├Ą─Š═╩Ū WPI ūįųŲĄ─š{įćŲ„ĪŻ
╚ń╣¹╩╣ė├ņ`äė╬ó╣┘ĘĮĄ─š{įćŲ„Ż¼ätąĶę¬Å─ņ`äė╬ó╣┘ŠW(w©Żng)╔ŽŽ┬▌dš{įćŲ„Ą─“īäėŻ©https://www.mindmotion.com.cn/support/development_tools/debug_and_programming_tools/Ż®ĪŻ▓óį┌ keil Ą─š{įćįOų├ųąŻ¼▀xō± MM32-LINK Debugger Ż¼╚ńłDŻ©9Ż®╦∙╩ŠĪŻ
łDŻ©9Ż®
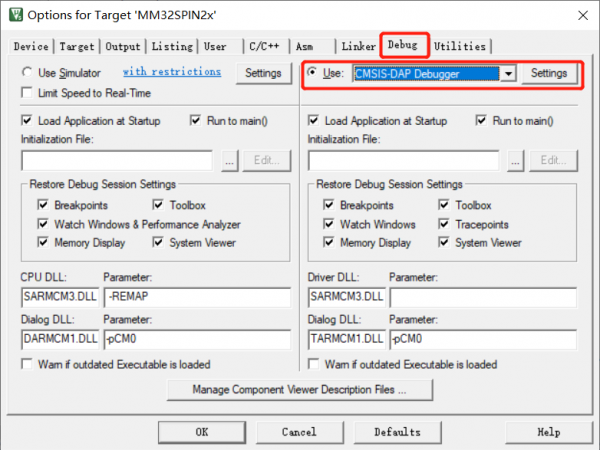
╬ę▀@└’╩╣ė├Ą─╩Ū WPI ūįųŲĄ─š{įćŲ„Ż¼▀@ĘNš{įćŲ„├Ō“īŻ¼į┌ keil Ą─š{įćįOų├ųąŻ¼▀xō± CMSIS-DAP Debugger Ż¼╚ńłDŻ©10Ż®╦∙╩ŠĪŻ
łDŻ©10Ż®
3.ķ_░l(f©Ī)░Õ╔ŽĄ─įOų├
ķ_░l(f©Ī)░Õ╔ŽĄ─╠°ŠĆįOų├╚ńłDŻ©11Ż®╦∙╩ŠŻ¼╝t╔½ś╦ėøĄ─ĄžĘĮąĶę¬Įė╠°ŠĆ├▒Ż¼Ųõ╦¹╬╗ų├┐╔ęį║÷┬įĪŻ
łDŻ©11Ż®
4.┤·┤aŽ┬▌d & ▀\ąą
īó┤·┤aŽ┬▌dĄĮķ_░l(f©Ī)░Õ╔Žų«║¾Ż¼ą²▐D┐╔š{ļŖūĶŲ„Ą─ą²ŌoŻ¼ļŖÖCåóäėĪŻ┐╔š{ūāūĶŲ„Ą─ūĶųĄįĮ┤¾Ż¼ļŖÖCĄ─▐D╦┘įĮĖ▀ĪŻ
╦─Īó┐éĮY
MM32SPIN360C ļŖÖCķ_░l(f©Ī)░Õ╔ŽĄ─ų„┐žųŲŲ„Ż©MM32SPIN360CŻ®ā╚ų├ŅA“īŻ¼╦∙ęį MCU ų╗ąĶę¬═ŌĮė 6 éĆ MOS ╣▄Š═┐╔ęį“īäė BLDC ļŖÖCŻ¼š¹éĆ“īäėļŖ┬Ę▒╚▌^║åå╬ĪŻ
▒Š╬─ÖnĮķĮB┴╦╚ń║╬╩╣ė├ MM32SPIN360C ļŖÖCæ¬ė├ķ_░l(f©Ī)░Õ“īäėĄ═ē║ėąĖąBLDC ļŖÖCĄ─ĘĮĘ©ĪŻė╔ė┌ėą╗¶Ā¢é„ĖąŲ„Ę┤üļŖÖC▐DūėĄ─╬╗ų├Ż¼╦∙ęįį┌ļŖÖCåóäė║═▀\ąąĄ─▀^│╠▒╚▌^ŲĮĘĆ(w©¦n)Ż¼Č°Ūę▓╗ąĶę¬╦ŃĘ©Ż¼“īäė┤·┤a▒╚▌^║åå╬ĪŻ
┤╦═ŌŻ¼┤╦ķ_░l(f©Ī)░Õę▓┐╔ęį“īäėėąĖą/¤oĖąš²Žę▓©ļŖÖCŻ¼▀@éĆ“īäėĄ─ĘĮĘ©īóį┌║¾├µĄ─▓®╬─ųąĮķĮBŻ¼Š┤šłŲ┌┤²ĪŻ╚ńąĶę¬┴╦ĮŌĖ³ČÓņ`äė╬óMCU«a(ch©Żn)ŲĘŻ¼šł┬ō(li©ón)ŽĄņ`äė╬ó║╦ą─┤·└Ē╔╠-Ęf╠žą┬┐Ų╝╝

ŠÄ▌ŗŻ║ls ūŅ║¾ą▐Ė─ĢrķgŻ║2022-06-13

ŽĄ┐═Ę■")
ŽĄ┐═Ę■")
ŽĄ┐═Ę■")
ŽĄ┐═Ę■")
